网络项目相关信息
本实验的实验原理和知识点覆盖了《农用无人机通识课程》、《小型飞行器基础》等多门本科生课程。
(1)农用无人机设计实验原理
根据农用无人机的功能结构、应用场景等,构建三维虚拟无人机零件库、作业环境飞行地图,通过将农用无人机标准化、模块化配件组装在一起,方便学生体验农用无人机设计。重点体会农用无人机在不同作业环境下的智能化功能,理解农用无人机技术与智慧农业的融合机理。
(2)农用无人机精量直播实验原理
重点学习掌握无人机水稻直播排种装置的工作原理和安装过程,仿真学习无人机水稻精量直播参数(如播种行数、行距、飞行高度和速度等)的设置原理和飞行控制,了解农用无人机飞行路径规划的作业实操要点。
(3)农用无人机植保作业实验原理
了解并熟悉不同无人机机型参数(最大载荷、喷施半径、电池容量、满载续航时间,空载续航时间,飞行速度,喷施流量等),能够根据作业参数的选择合适的机型进行作业;了解常见农作物(水稻、小麦)常见病虫害及对应药剂;熟悉航空施药基本操作流程,返航判断方式及注意事项,应急管控,了解药效跟踪评价。
(4)农用无人机遥感监测实验原理
了解农业航空遥感的主要应用领域,熟悉农用航空遥感系统的组成各组成单元的性能参数,可根据作业地域对农用无人机和遥感监测传感器进行正确选择,并设置作业参数(遥感设备设置、拍摄模式、飞行高度和速度)。
(5)农用无人机旋翼风场测试实验原理
基于计算流体力学知识,把农用无人机喷施过程中,不可见的旋翼风场、雾滴飘移与沉积过程,利用虚拟仿真技术,可视化展现出来,使学生对于航空喷施药液的影响规律形成较清晰的了解。通过对单旋翼和四旋翼农用无人机的旋翼风场进行三维动态模拟,了解不同旋翼结构和转速等情况下的流场特征,掌握无人机旋翼下方的气流速度、压强等参数的分布特性。
(6)农用无人机喷施雾滴的飘移和沉积实验原理
了解雾滴粒径的实验测量方法;了解不同粒径的雾滴在单旋翼和多旋翼无人机风场影响下的运动规律。通过虚拟仿真设置农用无人机的喷雾系统位置,了解喷头雾化后的雾滴在旋翼风场的胁迫作用下,朝着靶标运动的情况,明确喷头位置改变后的雾滴运动轨迹。
知识点:共 8 个
(1)农用无人机各组成结构与功能、飞行原理
(2)不同作业环境下的农用无人机设计和装配
(3)农用无人机水稻精量直播技术
(4)农用无人机植保作业技术
(5)农用无人机遥感监测原理与技术
(6)不同结构农用无人机的旋翼风场测试技术
(7)农用无人机喷施雾滴粒径的测试技术
(8)农用无人机喷施雾滴的飘移与沉积运动规律
二、核心要素仿真设计(对系统或对象的仿真模型体现的客观结构、功能及其运动规律的实验场景进行如实描述,限500字以内)
1、本实验所需核心农用无人机及关键实验装置的型号和参数如下:
|
单旋翼植保无人机 |
型号:S40E |
外形尺寸:2165×2400×720 |
材质:高强度碳纤维 |
药箱容积:20L |
|
喷头数量:5个 |
喷幅:7m |
雾化粒径:136-177微米 |
满载连续飞行时间:>12min |
|
|
四旋翼植保无人机 |
型号:M23E |
外形尺寸:1150×1080×550 |
材质:高强度碳纤维 |
药箱容积:10L |
|
喷头数量:4个 |
喷幅:5m |
雾化粒径:136-177微米 |
满载连续飞行时间:>12min |
|
|
遥感监测无人机 |
型号:精灵4RTK |
外形尺寸:1471×1500×482 |
测绘设备:DJI P1全画幅4500万测绘相机、DJI L1激光雷达可见光融合系统 |
航线规划:GS RTK、DJI Pilot |
|
数据处理:大疆智图 |
连续飞行时间:20min |
|||
|
水稻精量直播无人机 |
型号:谷上飞20 |
旋翼类型:八旋翼 |
外形尺寸:3700×3700×800 |
;单体种仓数量:6-10个 |
|
单体种仓容积:1kg |
可调行距20-30cm |
单次作业时间:4-12min |
续航时间:20min |
2、本实验所需场景描述如下:
本实验的核心要素包括:农用无人机设计、农用无人机精量直播、农用无人机植保作业、农用无人机遥感监测和精准农业航空喷施应用关键技术等,各要素仿真度如下:
(1)农用无人机设计虚拟仿真
该要素根据农用无人机的智能化应用方向,利用现代三维建模技术,按功能分别构建100个以上的无人机装配零件库、10种以上的环境监测传感器模型,以及10种以上不同作业环境飞行地图,使学生通过对无人机结构及原理的学习后,能根据不用作业环境和功能要求,进行个性化的农用无人机设计和装配。
该部分的仿真不仅突破了实体实验时所需装备和器材的成本高、消耗大等教学瓶颈,并且锻炼了学生将无人机的组成原理和飞行控制技术等专业理论知识应用于实践的能力,实现“虚实结合”,同时让学生体验了将农用无人机零件组成实物的成就感和乐趣。

(a) 构建的无人机装配零件库 (b) 农用无人机机体设计
图2 农用无人机设计素材库
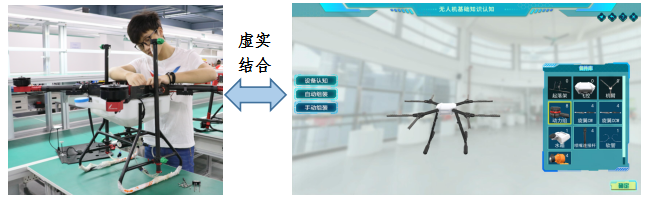
图3 农用无人机设计虚拟仿真
(2)农用无人机精量直播虚拟仿真
该要素构建了用于水稻精量条播的大田作业环境,将有关“无人机精量直播”的科研成果转化为本科实验,解决了实体实验受作业环境的时空影响问题,做到“以虚代实”。同时,用仿真手段学习无人机水稻精量直播参数(如播种行数、行距、飞行高度和速度等)的设置原理和飞行控制,解决了真实实验易受场地和器械限制的瓶颈,拓展了实验教学的深度与广度。
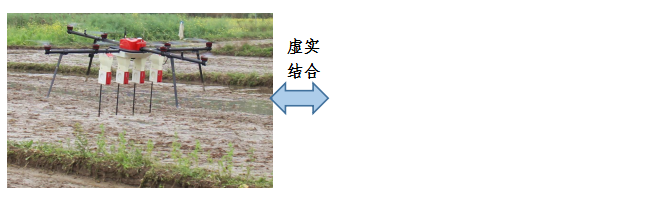
图4 农用无人机精量直播虚拟仿真
(2)农用无人机植保作业虚拟仿真
该要素模拟了利用无人机进行植保作业的实验环境,解决了真实农业航空植保作业实验危险性高、因摔机造成不可逆操作等问题。通过虚拟手段使学生根据不同作业参数选择合适的农用无人机,分析农用无人机飞行路径规划的作业要点,最后完成植保作业的过程。该部分仿真为学生熟悉航空施药基本操作流程与应急管控的真实工程背景,使学生有机会独立完成农用无人机航空植保作业全过程。
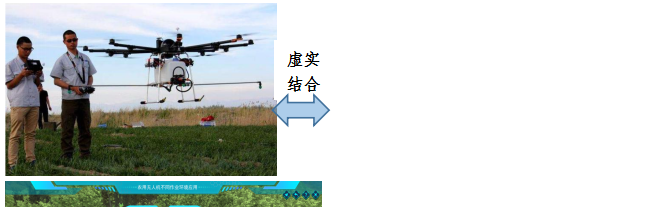
图5 农用无人机植保作业虚拟仿真
(3)农用无人机遥感监测虚拟仿真
该要素虚拟了农业航空遥感的主要应用领域,如结合人工智能技术,通过农业航空遥感探测作物的种类,以及农作物长势及病虫害监测。该部分仿真可使学生了解农用航空遥感系统的组成各组成单元的性能参数,能根据作业地域对农用无人机和遥感监测传感器进行正确选择,并正确设置作业参数,实现了“形象展示抽象”,拉近了遥感理论知识与真实工程实践之间的距离。
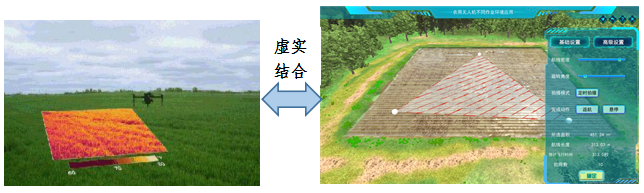
图6 农用无人机遥感监测虚拟仿真
(4)精准农业航空喷施应用关键技术虚拟仿真
该要素三维动态模拟了单旋翼和四旋翼农用无人机的旋翼风场,形象地仿真了雾滴粒径测试、农用无人机喷施雾滴的飘移和沉积等全过程。重点将雾滴粒径的实验测量方法,和不同粒径雾滴在无人机风场下的运动规律作为考核点。学生按照正确的实验步骤,选用正确的实验装置,并布置于农用无人机下需要的位置,方能获得实验分并继续实验。
该部分的仿真不仅突破了实体实验所需设备精密昂贵、实验耗费大的教学瓶颈,而且锻炼了学生将不可见的旋翼风场、雾滴飘移与沉积过程,利用虚拟仿真技术,可视化展现出来的能力,实现“以虚代实”,同时让学生了解农用无人机喷施雾滴的飘移和沉积规律。

(a) 雾滴粒径测试虚拟仿真
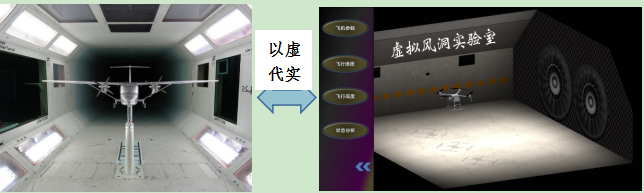
(b) 虚拟风洞试验
图7 精准农业航空喷施应用关键技术虚拟仿真