网络项目相关信息
一、学生交互性操作步骤(共 23 步)
表2 交互式操作步骤
|
步骤序号 |
步骤目标 要求 |
步骤合理用时 |
目标达成度 赋分模型 |
步骤满分 |
成绩类型 |
|
1 |
掌握农用无人机的基础知识 |
10分钟 |
完成客观选择题的答题。 |
5分 |
R操作成绩 R实验报告 R预习成绩 R教师评价报告 |
|
2-3 |
熟悉农用无人机的主要组成结构及其功用 |
10分钟 |
完成系统的虚拟操作。 |
5分 |
|
|
4-5 |
完成对农用无人机的设计 |
15分钟 |
根据任务要求,选择正确的无人机轴数、材质等,并确定动力模块、旋翼形状等。 |
10分 |
|
|
6-9 |
熟悉无人机水稻精量直播作业全过程 |
15分钟 |
完成排种器结构认识与调整、播种量的调节,模拟操作无人机完成水稻直播虚拟仿真作业。 |
10分 |
|
|
10-11 |
根据航空植保要求选择作业地块 |
5分钟 |
观察田块特征,根据作业任务选择正确的作业地块。 |
2分 |
|
|
12 |
对无人机进行选型和航线规划 |
10分钟 |
根据作业类型和田块特征,选用正确的无人机并进行航线规划。 |
3分 |
|
|
13 |
农用无人机植保作业虚拟仿真实验 |
15分钟 |
正确设置无人机飞行速度、高度,选取正确的航线类型、作业面积、喷雾系统和喷施流量等参数,完成植保作业的虚拟仿真操作。 |
10分 |
|
|
14-18 |
农用无人机遥感监测虚拟仿真实验 |
15分钟 |
了解农业航空遥感系统的各组成部件和功能,熟悉遥感作业参数设置,完成遥感监测的虚拟仿真操作。 |
15分 |
|
|
19 |
设置正确的风洞试验段尺寸 |
5分钟 |
了解风洞实验室的虚拟环境和各虚拟仪器设备的使用方法,设置风洞尺寸的实验风速。 |
5分 |
|
|
20-21 |
农用无人机的选取及虚拟风速仪的设置 |
15分钟 |
完成单旋翼/四旋翼农用无人机旋翼风场的三维动态模拟。 |
15分 |
|
|
22 |
压力和离心喷嘴雾滴粒径的虚拟测试 |
10分钟 |
通过虚拟实验室完成雾滴粒径的实验测量,了解激光粒度仪的使用方法。 |
10分 |
|
|
23 |
农用无人机喷施雾滴的飘移沉积虚拟仿真 |
10 |
设置农用无人机和喷雾系统参数,通过虚拟实验了解雾滴的飘移和沉积规律。 |
10分 |
二、操作步骤详细说明
1、农用无人机认知与设计虚拟仿真实验
知识点1:农用无人机基础知识认知(认知层次)
步骤1:点击无人机基础知识认知按钮,进入虚拟场景,然后逐一点击视图上的农用无人机知识点,包括:无人机的定义与特点、无人机的分类、多旋翼无人机基本结构、无人机动力系统、农用无人机、农用无人机旋翼风场、农用无人机雾滴飘移与沉积和遥感应用基本原理等内容,学习农用无人机的主要基础内容,对农用无人机的结构和功能进行全面的了解,掌握无人机的基础知识。
1.1点击“学习背景”按钮,可打开关联的知识点进行学习;
1.2点击“学习目的”按钮,可打开关联的知识点进行学习;
1.3点击“学习内容”按钮,左侧栏目罗列显示“无人机的定义与特点”、“无人机的分类”、“多旋翼无人机基本结构”、“无人机动力系统”、“农用无人机”、“农用无人机旋翼风场”、“农用无人机雾滴飘移与沉积”和“遥感应用基本原理”等8个按钮;
1.3.1点击左侧栏目“无人机的定义与特点”按钮,可打开无人机的定义与特点所对应的知识点进行学习;
1.3.2点击左侧栏目“无人机的分类”按钮,可打开无人机的分类所对应的知识点进行学习;
1.3.3点击左侧栏目“多旋翼无人机基本结构”按钮,可打开多旋翼无人机基本结构所对应的知识点进行学习;
1.3.4点击左侧栏目“无人机动力系统”按钮,可打开无人机动力系统所对应的知识点进行学习;
1.3.5点击左侧栏目“农用无人机”按钮,可打开农用无人机所对应的知识点进行学习;
1.3.6点击左侧栏目“农用无人机旋翼风场”按钮,可打开农用无人机旋翼风场所对应的知识点进行学习;
1.3.7点击左侧栏目“农用无人机雾滴飘移与沉积”按钮,可打开农用无人机雾滴飘移与沉积所对应的知识点进行学习;
1.3.8点击左侧栏目“遥感应用基本原理”按钮,可打开遥感应用基本原理所对应的知识点进行学习;
1.4点击“自测题”按钮,可学习后的测试答题。点击选项,点击提交,若答案正确,则提示回答正确,若答案错误,则提示回答错误,并显示正确答案。
1.5点击“农用无人机认知”按钮,屏幕罗列显示“农用无人机常见设备介绍”、“农用无人机基本结构组装”和“农用无人机任务载荷”。
1.5.1点击“农用无人机常见设备介绍”按钮,可打开农用无人机常见设备(如喷嘴、雾滴尺寸)所对应的知识点进行学习。
1.5.2点击“农用无人机任务载荷”按钮,屏幕罗列显示四种无人机任务载荷“摄像头”、“水箱”、“高光谱遥感系统”和“种子撒播装置”。按住鼠标右键可以对虚拟仿真的模型进行旋转,鼠标滚动键可以进行大小缩放。

图12 无人机基础知识认知
步骤2:点击农用无人机基本结构组装按钮,进入虚拟仿真环境,调整农用无人机虚拟三维视图。观察整机结构,熟悉四旋翼、六旋翼和八旋翼农用无人机的机臂配置,以及机架、动力装置和旋翼等基本组成,熟悉农用无人机的主要组成结构及其功用。

图13 农用无人机基本结构组装
2.1在左侧栏目点击“基础结构设计”按钮,主界面罗列显示“选择轴数”、“选择起落架”、“选择机臂材质”、“选择动力装置”和“选择旋翼材质”。
2.1在“选择轴数”下有三个按钮可供选项,分别是“四旋翼”、“六旋翼”和“八旋翼”。
2.3在“选择起落架”下有三种不同形状的起落架可供选择。
2.4在“选择机臂材质”下有两个按钮可供选项,分别是“玻璃纤维”和“碳纤维”。
2.5在“选择动力装置”下有两个按钮可供选项,分别是“电动装置”和“油动装置”。
2.6在“选择旋翼材质”下有四个按钮可供选项,分别是“木质”、“塑料”、“碳纤维”和“玻璃纤维”。
步骤3:在左侧栏目点击“自动组装”,然后在主界面右下角点击“爆炸”,便可以三维爆炸图的方式展示农用无人机的结构,了解每个组成部分的名称和安装位置。再点击“恢复”便可恢复原样。
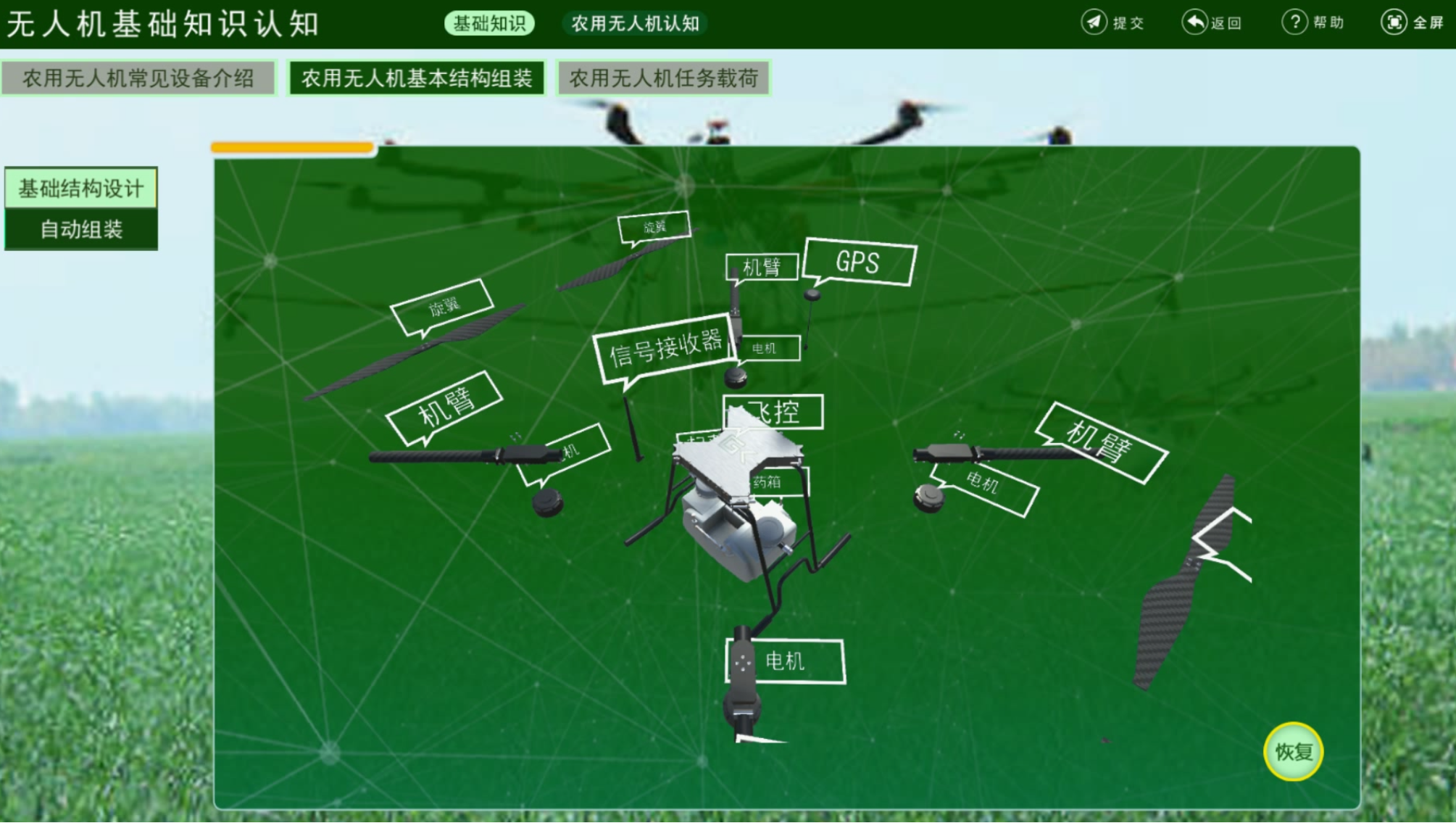
图14 农用无人机三维结构认知
知识点2:农用无人机设计(应用层次)
步骤4:点击无人机设计按钮,进入无人机设计虚拟仿真环境,依次选择拟设计无人机的轴数(4轴、6轴和8轴)、材质(塑料、碳纤维)、支架和起落架形式,并确定动力模块(电动、油动)、旋翼形状和喷嘴类型,按照步骤完成对农用无人机的设计。

图15 农用无人机设计
4.1选择轴数
通过主机体两侧箭头或鼠标点击主机体(轴数分为四旋翼、六旋翼和八旋翼三种类型),选择对应轴数的主机体,点击确认选择即可保存选择,点击返回则返回到上一级。
4.2选择起落架
点击起落架图标,会出现3种不同类型的起落架,分别记为起落架1,起落架2和起落架3,可根据需求进行选择,选择完后点击确定即可保存选择,点击返回可取消。
4.3选择机臂材质
点击机臂图标,会出现2种不同材质(玻璃纤维和碳纤维)的无人机机臂,可根据需求进行选择,选择完后点击确定即可保存选择,点击返回可取消。
4.4选择动力装置
无人机动力装置需安装无人机机臂后才可激活,激活后点击动力装置图标,会出现2种不同类型(电动装置和油动装置)的动力装置,可根据需求进行选择,选择完后点击确定即可保存选择,点击返回可取消。
4.5选择旋翼
无人机旋翼需安装无人机动力装置后才可激活,激活后点击旋翼图标,会出现4种不同类型(木质,塑料,玻璃纤维和碳纤维)的旋翼,可根据需求进行选择,选择完后点击确定即可保存选择,点击返回可取消。
4.6选择无人机任务载荷
任务载荷部分设置有以下5个选项:航拍无人机、农用无人机(喷施)、农用无人机(遥感)和环境监测无人机。具体的操作步骤如下:
点击功能模块图标,会出现不同的任务载荷(包括摄像头(或相机)、水箱、高光谱遥感系统和环境检测传感器),可根据需求进行选择,选择完后点击确定即可保存选择,点击返回可取消。
4.6.1如任务载荷选择的是航拍无人机,则装配的是摄像头(或相机)。
4.6.2如任务载荷选择的是农用无人机(喷施),则装配的是水箱。
4.6.3如任务载荷选择的是农用无人机(遥感),则装配的是高光谱遥感系统。
4.6.4如任务载荷选择的是农用无人机(直播),则装配的是种子撒播装置。
4.6.5如任务载荷选择的是环境监测无人机,则装配的是环境检测传感器。
2、农用无人机精量直播环节
知识点3:农用无人机水稻精量直播技术虚拟仿真(应用层次)
步骤5:点击运行模拟,进入无人机水稻精量直播作业虚拟仿真,通过虚拟无人机飞行和田间作业,熟悉无人机精量直播路径规划和田间播种等环节的操作技能及注意事项,掌握无人机水稻精量直播作业流程。具体实验过程为:
步骤6:从系统提供的作业地块示意图中(旋耕整平的方形和梯形天宽),选择需要的作业地块。
步骤7:对无人机进行路径规划,可选择智能AB点模式,并分别设定路径规划中A、B点具体位置,同时设定飞行方向。
步骤8:确定播种参数,根据飞行任务选择播种行数(6-10行),以及播种行距(20-30cm);设置无人机的飞行高度(不超过1.5m)和飞行速度(不超过6m/s)。
步骤9:打开种箱盖虚拟添加稻种,然后启动农用无人机,此时无人机进入自动播种状态,当播种完无人机自动回到出发位置。

图16 农用无人机水稻精量直播
3、农用无人机植保作业环节
知识点4:农用无人机植保作业虚拟仿真(应用层次)
步骤10:点击进入农用无人机作业地块选取虚拟场景,观察待选田块形貌,观察田块特征,然后逐一点击视图上的田块类型(长方形、梯形、异性等),了解每个田块的特征,对无人机飞行前的作业环境进行全面的了解,完成后选择进入(某种田块)植保作业。观察田块的病虫害特征,选择相应的药液,并进行药液的配置。
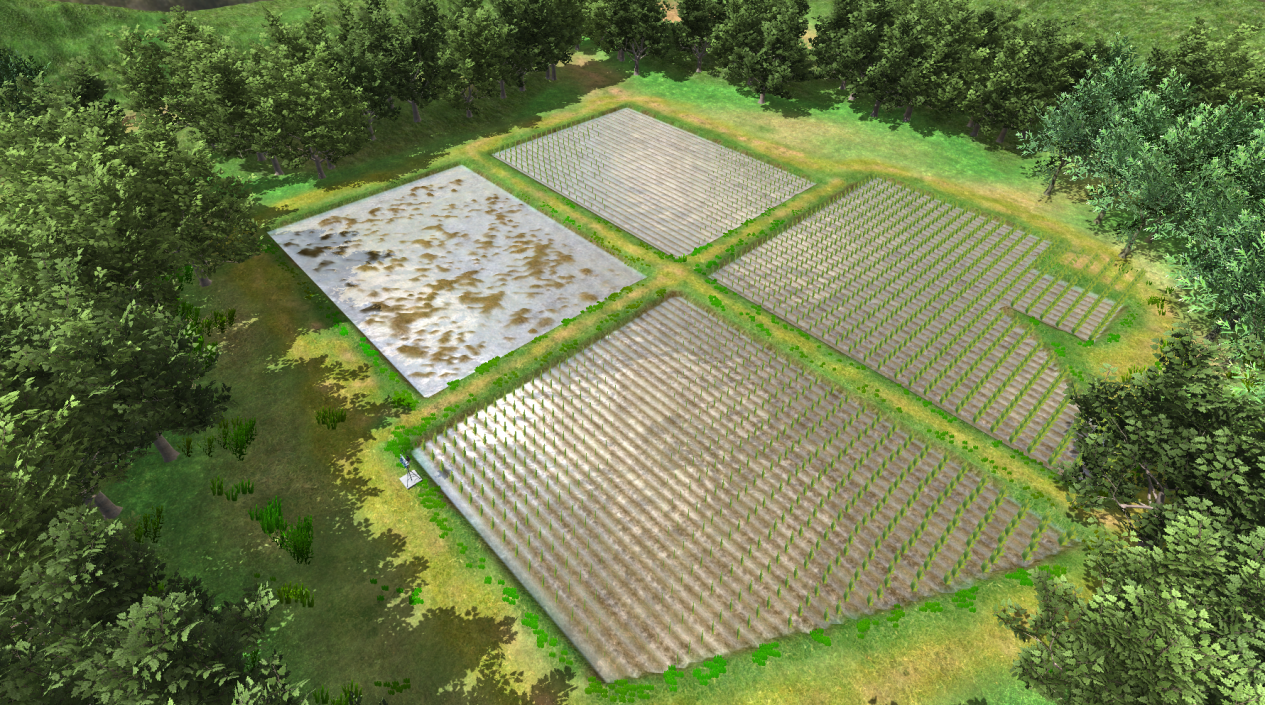
图17 作业地块选择
步骤11:无人机选型和航线规划
11.1选择农田后,进入选择农用无人机机型页面(4旋翼和6旋翼两种机型),文字展示飞机模型及相关参数,包括最大载荷、喷施半径、电池容量、飞行高度、飞行速度、喷施流量等;
11.2根据农田长宽及喷施半径生成的栅格化航线图;选择返航方式,可选项为不返航(在此处学生可通过对机型参数中满载续航时间及飞行速度综合考虑是否为多架次作业,如为单架次作业,可不返航),载荷消耗完毕返航,预警电量返航(可选预警电量为多少),总体规划返航(询问返航点所处位置,可在竖向航线段的两端点及三等分点,横向航线段的中点进行选择)。
11.3除了选择不返航选项,其他选项进入询问是否需要补给点的页面,不需要则按否,需要则按是;如果选择是,之后出现按照不同返航方法计算得出的返航点分布图,随后弹出补给点的个数与位置的选择页面,可选择在短边及长边放置补给点,并选择补给点的个数,在田边按等比例放置。按否则直接进入下一页面。
11.4进入载荷分配方式选择页面,分为满载荷和规划载荷两个选项,选择满载荷则进入作业页面,选择规划载荷则进入架次载荷选择(在此,学生可根据作业时长与喷施流量的计算共同决定)
步骤12:虚拟植保作业
12.1进入作业页面,播放作业动画视频,右上角具平面航线及无人机运动轨迹、返航轨迹。
12.2如有田间坠机,直接进入结束页面,并弹出评分为0分,以及安全警戒标语
12.3如安全完成作业,进入结束页面,并弹出评分(以完美方案为标准),60以下为不及格,60-80为良好,80-90为优秀,90-99为接近完美,100为完美,并附有不同环节的打分,弹出不同的鼓励话语。
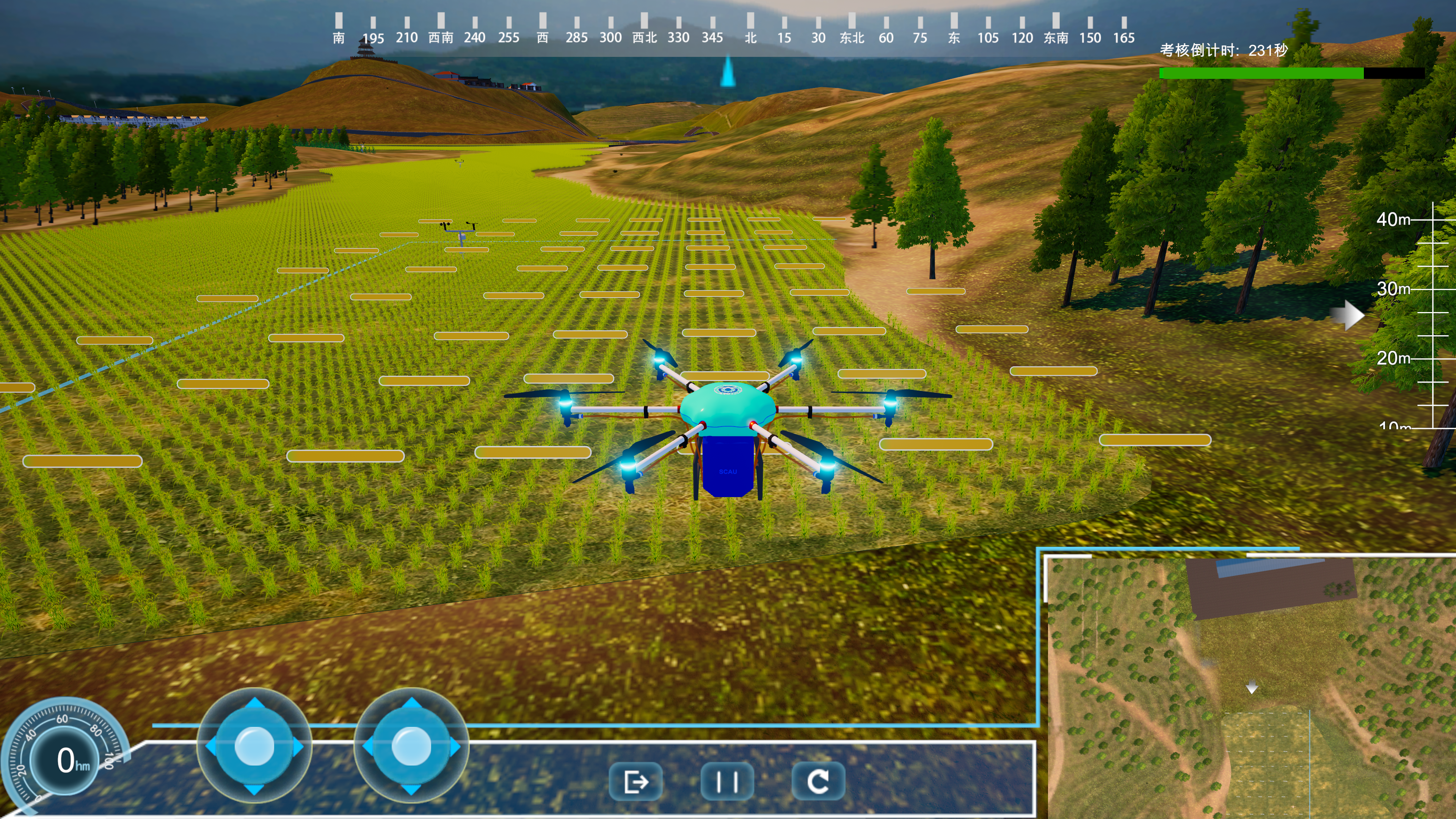
图18 农用无人机植保作业虚拟仿真
4、农用无人机遥感监测环节
知识点5:农用无人机遥感监测虚拟仿真(应用层次)
步骤13:无人机选型。无人机有固定翼和旋翼两种机型,配以文字讲解和“爆炸”视图,使学生掌握典型无人机的相关组件,更好的了解无人机。同时,无人机的选择需要根据区域环境、载重与续航时间等因素进行调整。
13.1根据任务区域选择合适的无人机类型,面积小于0.5平方公里选择旋翼,否则选择固定翼;
13.2查看所选机型的载重、抗风能力与续航时间,该因素将影响光学传感器的选择以及航线规划效果。
步骤14:光学传感器选择。点击RGB相机和高光谱相机认知。进入虚拟场景,通过文字、音频或视频等方式展示光学传感器参数,包括CM0S尺寸、镜头焦距、光谱分辨率等,根据上述信息计算在特定距离(100m)时的空间分辨率。
步骤15:学生观察虚拟区域环境,判断是否可以作为起飞地点。同时应结合航线规划的结果,判断以该起飞点进行航线规划是否能达到任务标准。
15.1根据法律法规,判断该区域是否可以合法地进行无人机飞行;
15.2观察周围环境,确定起飞点上空无障碍物,周围环境宽敞,起飞地点平整;飞行时的大阳高度角是否过低,否则会在相片上造成阴影观察;
步骤16:根据任务要求,设置并调整优化航线,掌握无人机航线规划时的主要参数设置及其互相影响。
16.1在地图上将需要监测的区域勾画出来;
16.2根据相机分辨率和任务要求,设置飞行高度;
16.3设置航向重叠度、旁向重叠度,并根据航向重叠度和相机的拍摄性能,设置无人机飞行速度;
16.4设置无人机飞行方向,检查任务规划软件预测的飞行总时间是否超过无人机的续航能力。如果满足要求,则该步骤结東。如果不满足,进行下一步;
16.5分别改变无人机航向,改变旁向重叠度,改变飞行速度,观察飞行时间的变化规律。
步骤17:利用遥控器或键盘控制无人机飞行,观察飞行过程中反馈的参数信息以及实时显示的飞机拍摄照片,可以对航拍情况进行直观了解。同时针对突发情况,学生可以进行降落操作,增加学生观察能力和应变处理能力。
17.1进入起飞点,在地面站上点击“起飞”按钮,无人机将离开地面,按照航线规划的路线进行飞;
17.2通过地面站观察飞行参数,包括距离、高度、速度、航向、剩余电量等信息,同时可观察无人机实时拍摄的影像;
17.3飞行过程中注意观察周边环境,如遇紧急情况(如电量不足、恶劣天气等),学生需要通过主观判断,选择召回飞机降落,或者就近降落。
17.4利用虛拟按键控制无人机降落,调整无人机降落的速度和位置,保证无人机安全降落。

图19 农用无人机遥感监测虚拟仿真
5、精准农业航空喷施应用关键技术环节
知识点9:农用无人机旋翼风场虚拟仿真(熟悉层次)
步骤18:点击运行模拟,进入虚拟风洞实验室,根据提示依次完成无人机旋翼风场虚拟仿真实验。学生首先确认合适风洞试验段的尺寸,并设置正确的风洞试验段长、宽、高尺寸。
步骤19:从提供的单旋翼和四旋翼农用无人机中,选择拟进行实验的无人机,并虚拟设定飞行参数,飞行高度1-2.5m、飞行速度0-6m/s。
步骤20:学生根据想观察的数据,设置虚拟风速仪的摆放位置,点击开始进入虚拟实验,待实验结束后点击状态分析查看实验数据与结果。
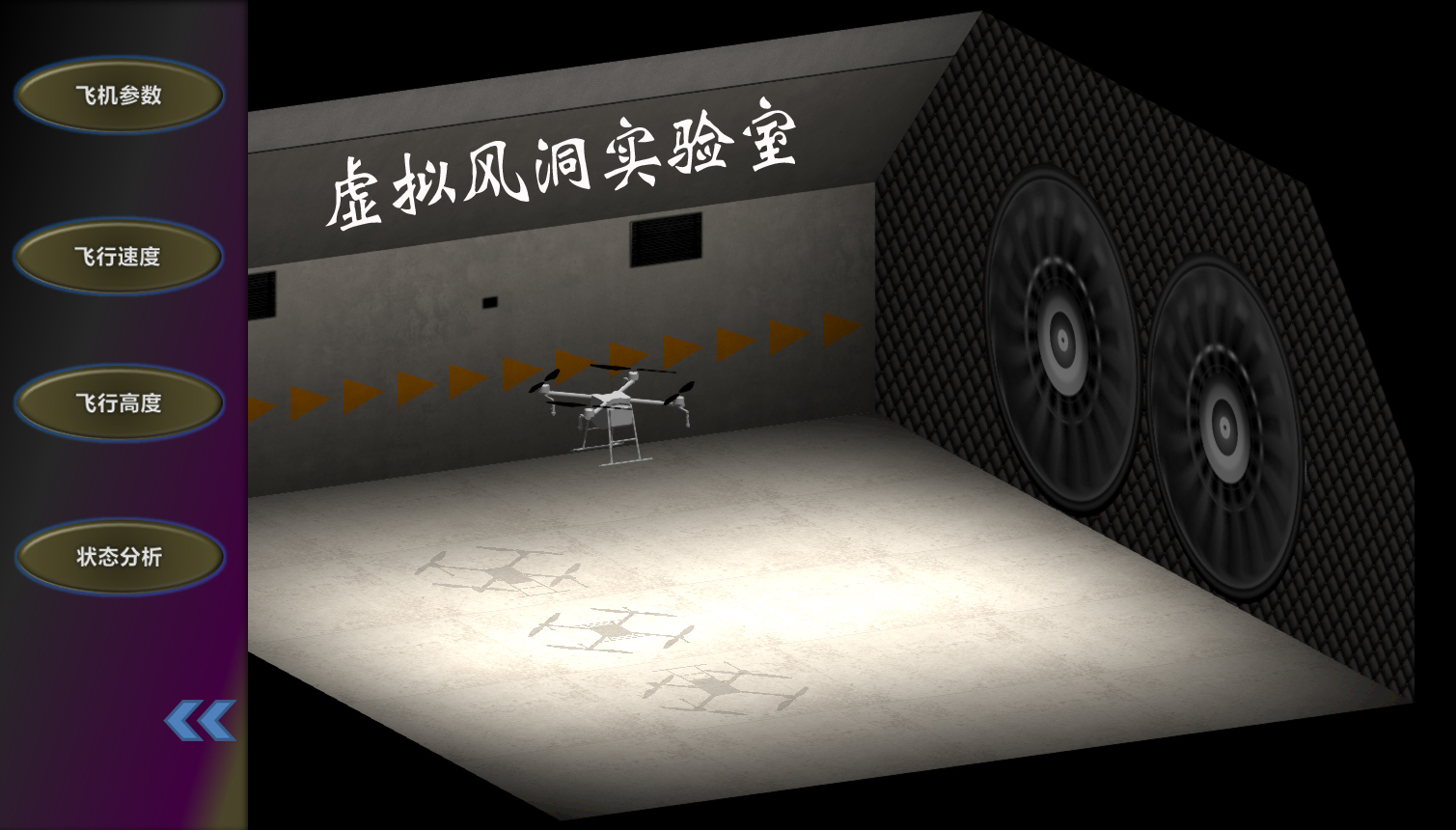
图20 农用无人机旋翼风场虚拟仿真
知识点10:农用无人机喷施雾滴的飘移和沉积虚拟仿真(应用层次)
步骤21:学点击运行模拟,进入虚拟雾化实验室,根据提示依次完成无人机喷施雾滴的飘移和沉积虚拟仿真实验。首先从提供的液力喷嘴和离心喷嘴中,选择需要测试的喷嘴类型,并设置好喷施压力(范围100-200kPa)和流量(1-1.5L/min)。
步骤22: 点击激光粒度仪,学习激光粒度仪的测量原理,并完成激光粒度仪的对中和扣除背景杂波操作。设置完毕后,点击实验按钮,利用激光粒度仪完成对喷嘴喷施雾滴粒径的测量,并生成雾滴谱图。
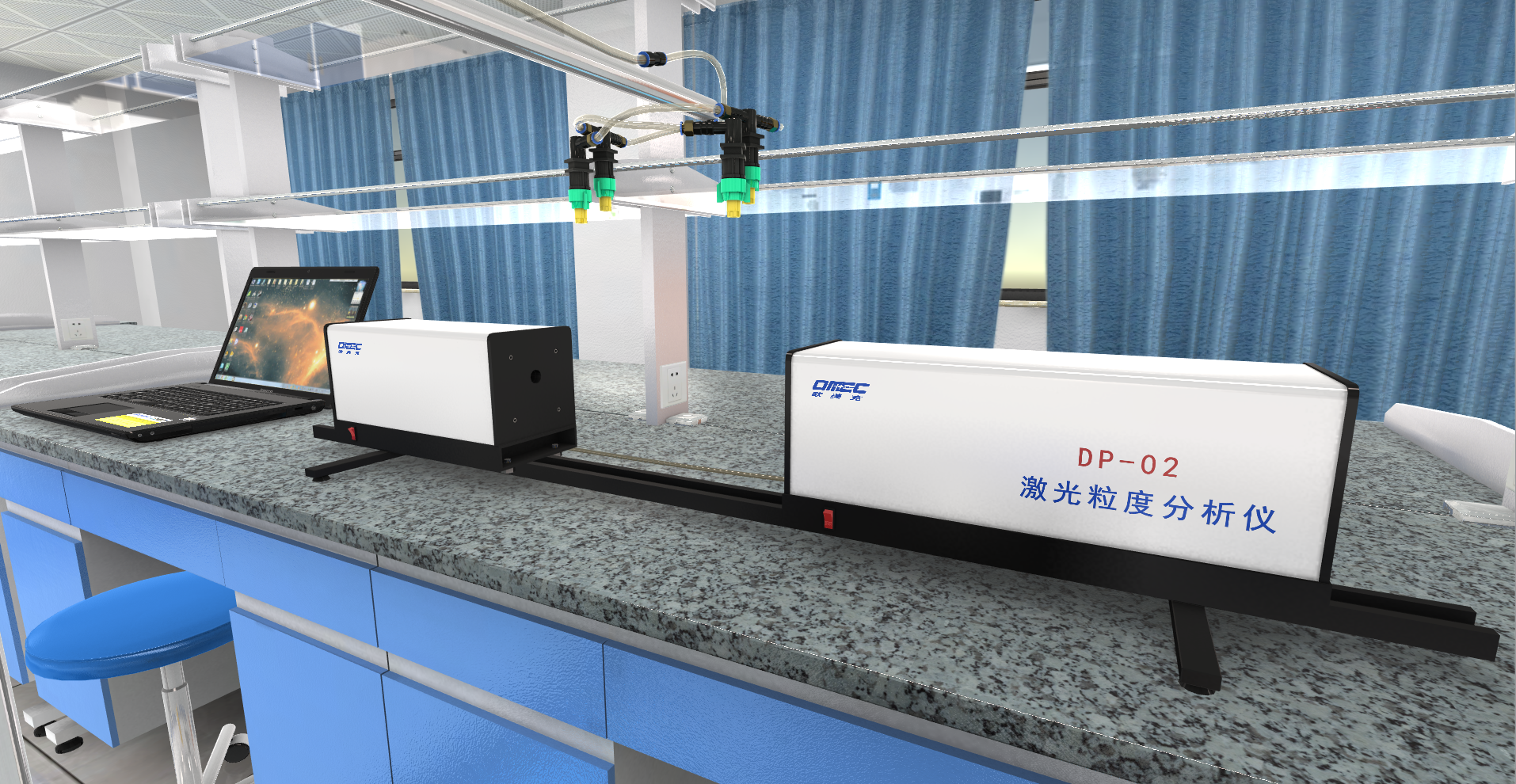
图21 虚拟雾化实验室的激光粒度仪
步骤23: 从提供的单旋翼和四旋翼无人机中,选择实验用的农用无人机,确定飞行参数(飞行高度1.5-2m、飞行速度0-6m/s),点击查看按钮,观察并了解不同粒径的雾滴在单旋翼和多旋翼无人机旋翼风场影响下,在靶标区域的沉积和向非靶标区域飘移的情况,并查看实验数据与结果。
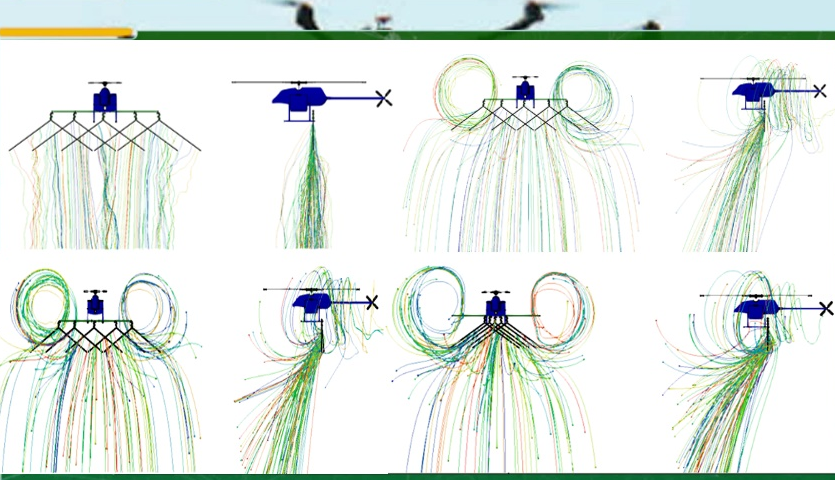
图22 旋翼风场作用下的雾滴飘移沉积虚拟仿真
6、考核环节
一、学生交互性操作步骤(共 23 步)
表2 交互式操作步骤
|
步骤序号 |
步骤目标 要求 |
步骤合理用时 |
目标达成度 赋分模型 |
步骤满分 |
成绩类型 |
|
1 |
掌握农用无人机的基础知识 |
10分钟 |
完成客观选择题的答题。 |
5分 |
R操作成绩 R实验报告 R预习成绩 R教师评价报告 |
|
2-3 |
熟悉农用无人机的主要组成结构及其功用 |
10分钟 |
完成系统的虚拟操作。 |
5分 |
|
|
4-5 |
完成对农用无人机的设计 |
15分钟 |
根据任务要求,选择正确的无人机轴数、材质等,并确定动力模块、旋翼形状等。 |
10分 |
|
|
6-9 |
熟悉无人机水稻精量直播作业全过程 |
15分钟 |
完成排种器结构认识与调整、播种量的调节,模拟操作无人机完成水稻直播虚拟仿真作业。 |
10分 |
|
|
10-11 |
根据航空植保要求选择作业地块 |
5分钟 |
观察田块特征,根据作业任务选择正确的作业地块。 |
2分 |
|
|
12 |
对无人机进行选型和航线规划 |
10分钟 |
根据作业类型和田块特征,选用正确的无人机并进行航线规划。 |
3分 |
|
|
13 |
农用无人机植保作业虚拟仿真实验 |
15分钟 |
正确设置无人机飞行速度、高度,选取正确的航线类型、作业面积、喷雾系统和喷施流量等参数,完成植保作业的虚拟仿真操作。 |
10分 |
|
|
14-18 |
农用无人机遥感监测虚拟仿真实验 |
15分钟 |
了解农业航空遥感系统的各组成部件和功能,熟悉遥感作业参数设置,完成遥感监测的虚拟仿真操作。 |
15分 |
|
|
19 |
设置正确的风洞试验段尺寸 |
5分钟 |
了解风洞实验室的虚拟环境和各虚拟仪器设备的使用方法,设置风洞尺寸的实验风速。 |
5分 |
|
|
20-21 |
农用无人机的选取及虚拟风速仪的设置 |
15分钟 |
完成单旋翼/四旋翼农用无人机旋翼风场的三维动态模拟。 |
15分 |
|
|
22 |
压力和离心喷嘴雾滴粒径的虚拟测试 |
10分钟 |
通过虚拟实验室完成雾滴粒径的实验测量,了解激光粒度仪的使用方法。 |
10分 |
|
|
23 |
农用无人机喷施雾滴的飘移沉积虚拟仿真 |
10 |
设置农用无人机和喷雾系统参数,通过虚拟实验了解雾滴的飘移和沉积规律。 |
10分 |
实验前评价由在线学习时间(30%)、实验前自测成绩(40%)、互动交流情况(20%)和实验前提问质量(10%)组成,在共享平台上通过网络记录、学生自评、系统评价和教师点评等评定成绩,主要考查自主学习、主动发现、总结提炼等能力,占实验考核成绩的20%。
实验中评价由学习效果评价(20%)、小组互评(20%)和实验活动评价(60%)组成,主要考查学生的实验操作方法是否正确、过程是否规范、观察是否仔细等,占实验考核成绩的50%。
实验后评价由在线测试结果(30%)、实践参与度(30%)和实验报告(40%)组成,主要考查学生的学以致用、探索性应用、分析解决问题等能力,占实验考核成绩的30%。

图12 无人机基础知识认知