虚拟实验
实验原理
本实验围绕南方水稻生产全程机械化实际作业需求,主要内容包括了耕整、种植、田间管理、收获和谷物干燥5个环节的10种代表性机具或装备,知识点:共 10 个。
1.水田耕整环节
知识点(1):水田旋耕机虚拟仿真实验(认知层次)
机具特点:旋耕机是与拖拉机配套完成犁、耙作业后的耕作机械,旋耕机能够切碎埋在地表以下的根茬,为后序播插工序提供良好种床,旋耕后表土细碎,地面平整,用于稻田带水旋耕或旱地播前整地。旋耕机由机架、传动装置、刀轴、刀片、罩壳和平地拖板等组成。
工作原理:旋耕机工作时,刀片安装在刀轴上并由拖拉机动力输出轴驱动做回转运动,同时随机组前进做等速直线运动。刀片在切土过程中,先切下土垈,抛向并撞击罩壳与平地拖板,土垡细碎后再落回地表上。
仿真要素:旋耕机刀片是核心部件,也是本实验仿真知识点的核心要素。重点仿真学习旋耕机刀片工作原理和安装结构(如安装方向),虚拟仿真旋耕机在水田中的田间旋耕作业过程,了解旋耕机田间操作要点(如升降、动力切换和旋耕路线等)。
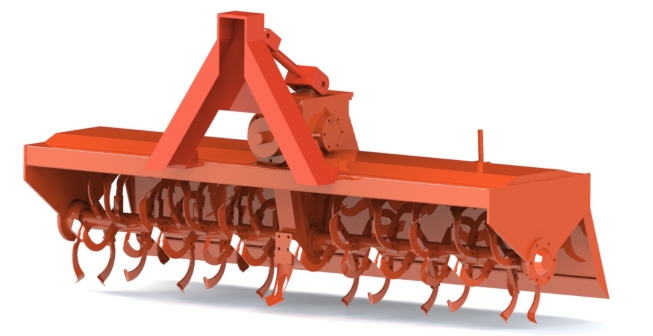
图1 水田旋耕机三维图
知识点(2):水田激光平地机虚拟仿真实验(应用层次)
机具特点:水田激光平地机可实现水稻种植前的水田精准平地,可为水稻生长提供良好的田面环境,有利于提高水肥利用率和灌水均匀度。华南农业大学自主研发的水田激光平地机主要由插秧机机头、平地铲、控制系统和液压系统等组成,其特点在于与插秧机机头配套,水田驱动轮较窄不易产生较大轮辙,转弯效率高。
工作原理:激光平地机利用旋转的激光光束作为基准面,通过固定在平地铲上的激光接收器检测激光基准信号,检测平地铲的高程偏差,以偏差信号控制液压驱动系统实现平地铲的升降,从而实现农田的精细平整。水田激光平地机还增加了平地铲的水平自动调平机构,在水田平地作业时平地铲左右倾斜角度可以调整,从而保证平地铲水平作业。
仿真要素:控制系统(接收器和控制器)和平地铲是水田激光平地机核心部件,也是本实验仿真知识点的核心要素,重点学习了解平地铲的高程和水平控制原理和过程效果,仿真学习激光接收器和控制器的操作流程,了解水田激光平地机在田间的作业实操要点(如平地基准设置、平地路线等)。
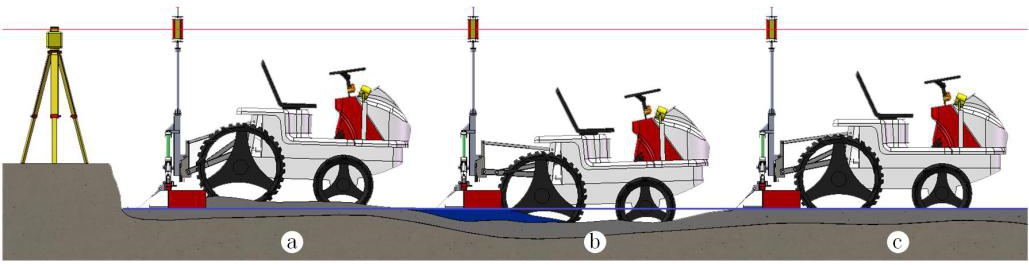
图2 激光平地机工作原理图
2.水稻种植环节
知识点(3):水稻精量穴直播机虚拟仿真实验(掌握层次)
机具特点:水稻机械化直播是一种轻简化栽培技术模式,具有省工、省时、省力、通风透气性好、病虫害少、分蘖节位低和后期长势好等优势特点。水稻穴播是指按一定行距、穴距、穴径、播深和播量将稻种成穴地播入田面种沟中,主要特点是作业效率较高、成本较低、播种量调节范围大。华南农业大学自主研发的水稻精量穴直播机由乘坐式高速插秧机机头、机架、动力传动机构和播种装置组成,播种装置主要包括排种器、种箱、滑板、蓄水沟开沟器、播种沟开沟器、仿形装置、挂接平衡装置等部件。
工作原理:水稻精量穴直播机工作时,先将操作手柄置于插植档位,液压油缸卸荷,机具随自重下落,在高程仿形机构和水平仿形机构的作用下滑板始终紧贴泥面,播种沟开沟器和蓄水沟开沟器压入土壤内,随着机器前进,开出蓄水沟和播种沟;同时,排种器在动力传动系统的驱动下,将种子以穴播的形式播入播种沟内;两侧挡泥板防止水和泥浆涌入已播种区。
仿真要素:播种装置和排种器是水稻精量穴直播机核心部件,也是本实验仿真知识点的核心要素。重点仿真学习了解排种器的结构特点、工作原理和调节操作等,仿真学习播种装置的结构特点、挂接方法和动力传动调试等,仿真了解水稻精量穴直播机在田间的作业实操要点(如穴距调节、播量调节、仿形调节、机具升降、动力切换、直播作业路线等)。

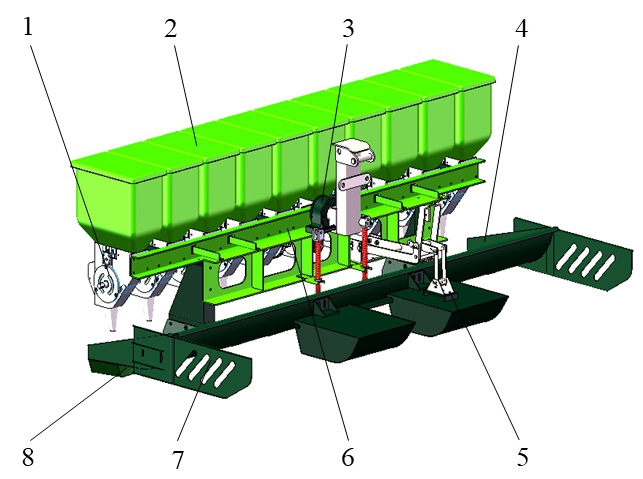
1.排种器 2.种箱 3.水平仿形机构 4.滑板 5.感应浮箱
6.机架 7.侧板 8.蓄水沟和种沟开沟器
图3 水稻精量穴直播机田间作业及播种装置结构
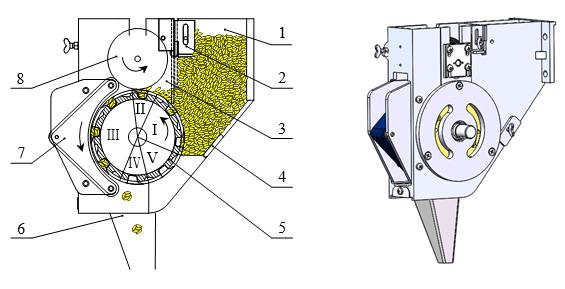
1.第一充种室 2.限种板 3.第二充种室 4.卸种板 5.组合型孔排种轮 6.排种管 7.弹性承运护种带 8.清种毛刷 I. 充种区 II. 清种区 III. 护种区 IV. 投种区 V. 过渡区
图4 播量可调组合型孔式排种器
知识点(4):智能水稻秧盘育秧精密播种生产线虚拟仿真实验(应用层次)
机具特点:智能水稻秧盘育秧精密播种生产线能实现智能恒量且对行、对穴及撒播精密播种,既满足超级杂交稻和杂交稻低播量(30~80克/盘)的精密播种要求,又适用于常规稻大播量(100~150克/盘)的播种要求,同时也适用不同规格软(硬)类型秧盘(钵体盘、钵体毯状盘、毯状盘)的工厂化秧盘育秧精密播种作业。华南农业大学自主研发的智能水稻秧盘育秧精密播种生产线由取盘台、自动叠盘装置、秧盘限位装置、表土铺放装置、播种装置、淋洒水装置、平床土装置、自动供盘装置和动力装置等组成。
工作原理:智能水稻秧盘育秧精密播种生产线主要包括自动供盘、铺床土、压床土、淋洒水、精密播种(撒、条和穴播)、覆表土、压盘、清扫、自动叠盘等多项工序可一次性完成。其中,智能恒量精密播种装置利用嵌入式系统与机器视觉技术,实现播量在线动态检测,并根据播种性能,形成“闭环控制”的反馈信号,最终达到播量恒定、智能化调控。
仿真要素:智能恒量精密播种装置是智能水稻秧盘育秧精密播种生产线核心部件,也是本实验仿真知识点的核心要素。重点仿真学习了解智能恒量精密播种装置的结构特点、工作原理和调节操作等,仿真学习智能水稻秧盘育秧精密播种生产线每个工序的结构特点、用途和基本原理等,仿真了解智能水稻秧盘育秧精密播种生产线的生产操作要点(如稻种处理、苗土处理、秧盘供盘控制、播种量调节等)。
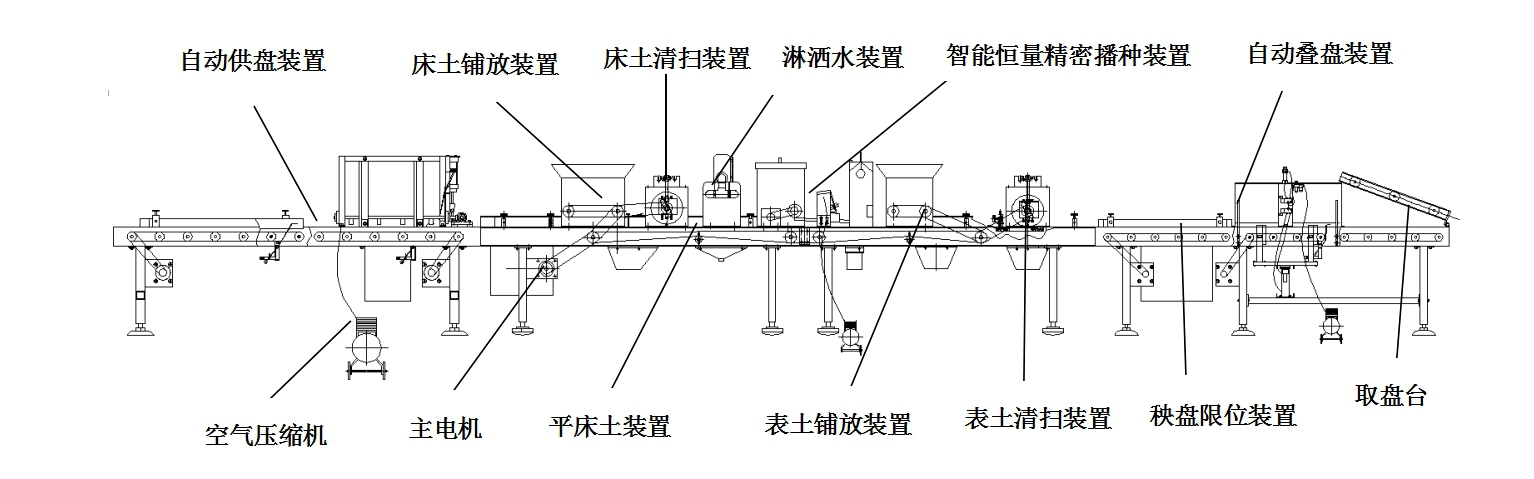

图5 智能水稻秧盘育秧精密播种生产线
知识点(5):智能水稻工厂化育秧系统虚拟仿真实验(认知层次)
机具特点:智能水稻工厂化育秧系统是基于温室基础上的水稻育秧装置与系统,可根据立体苗床和LED植物补光灯实现温室内水稻培育而不受季节、土地资源、气候等因素的制约。采用温室立体育秧技术能够提高土地利用率,对资源节约意义重大;采用补光灯进行温室立体育秧能够随时进行育秧而不受四季变化和气候变化的影响。该装备主要由温室、催芽机、智能水稻秧盘育秧精密播种生产线、光控系统和控制系统等组成。
工作流程:主要包括定播期、精选种子、晒种脱芒、浸种、催芽、育秧土准备、育秧盘准备、播种、温度控制、湿度控制、炼苗等。
仿真要素:本实验仿真知识点的核心要素是温室工厂化育秧概念,重点仿真了解水稻工厂化育秧系统的组成、用途、操作基本流程等。

图6 智能水稻工厂化育秧系统
知识点(6):同步施肥水稻高速插秧机虚拟仿真实验(应用层次)
机具特点:水稻高速插秧机是将秧苗移植至稻田中的一种水稻种植机械。同步侧深施肥技术是有效减少化肥使用量和提高化肥利用率的新技术、新方法,在时间维度和空间维度上精确施肥,显著提高化肥利用率、减少化肥用量和面源污染。同步施肥水稻高速插秧机主要由动力底盘、插秧装置、施肥装置、机架和动力传动机构等组成。
工作原理:水稻高速插秧机工作时,分插机构从苗床中取出一定株数秧苗植入一定深度的泥土中,为了保持对苗床与地面的角度为直角,秧爪的前端移动时采用椭圆形的动作曲线,动作是靠着旋转式或变形齿轮的行星机构来完成。在插秧的同时,同步侧深施肥装置进行开沟和施肥,将一定数量的肥料深施在插秧行一侧。
仿真要素:分插机构和施肥机构是同步施肥水稻高速插秧机的核心部件,也是本实验仿真知识点的核心要素。重点仿真学习了解分插机构和施肥机构的结构特点、工作原理和调节操作等,仿真了解同步施肥水稻高速插秧机在田间的作业实操要点(如株距调节、取秧量调节、肥量调节、机具升降、动力切换、作业路线等)。
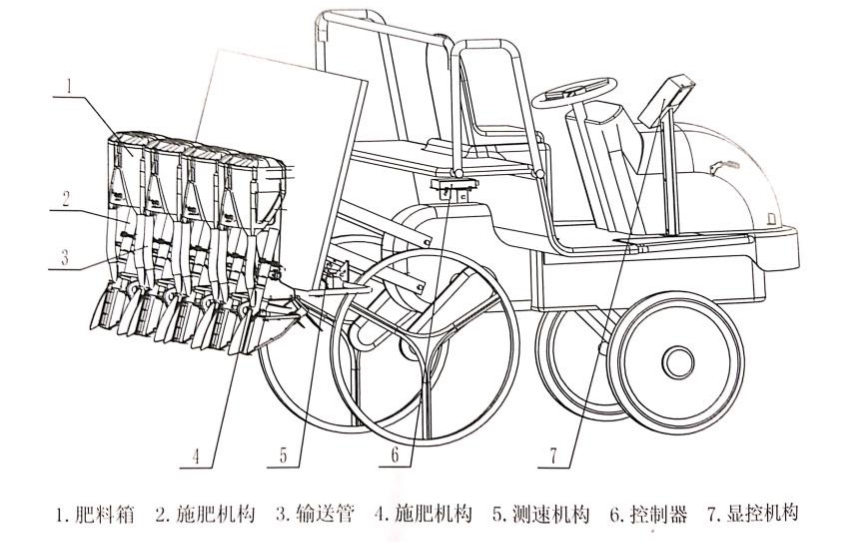
图7 同步施肥水稻高速插秧机
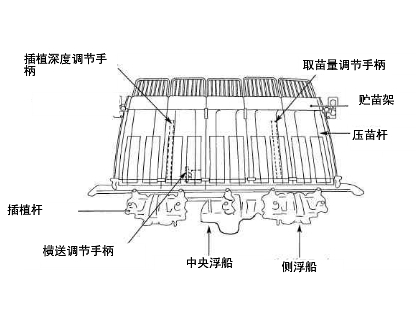

图8 分插机构和施肥机构
3.水稻田间管理环节
知识点(7):水田植保无人机虚拟仿真实验(应用层次)
机具特点:农用植保无人机具有小、轻、方便运输、无需跑道、操控灵活的特点,能够满足不同地域、地块和作物的植保需求,单位面积施药量小,作业效率高。目前水田植保无人机作业是基于遥控指挥的,人为因素依赖大,人为即时规划的飞行路线与理论航线偏差严重,作业遗漏率及重复率高;植保无人机作业时由于电量过低而迫降到农田里的情况时有发生,甚至有突然失控坠机的危险。水田植保无人机主要由无人机机身、电池、喷药机构、控制系统等组成。
工作流程:首先,根据作业区域、喷施幅度、飞行速度、喷施流量合理规划出飞行航线和飞行高度;其次,在多架次作业中,若是按照传统载荷分配(单架次满载起飞作业,喷施完农药后返航)进行,无人机能量及载荷耗尽时必须返航的时机并不一致,则会产生更多的返航航程。
仿真要素:本实验仿真知识点的核心要素是作业参数和航线规划。根据农田参数(长、宽)及不同无人机机型参数(最大载荷、喷施半径、电池容量、满载续航时间、空载续航时间、飞行速度、喷施流量等)对无人机机型的选择。航线规划是喷施作业规划中十分重要的一部分,直接影响到返航航程长短、能耗多少、载荷合理分配以及安全性等问题。
.jpg)
图9水田植保无人机作业现场
.jpg)
图10 无人机航线规划路线
知识点(8):水田高地隙植保机虚拟仿真实验(应用层次)
机具特点:水稻植保作业是水稻生产全程机械化中作业次数最多(需要3-8 次作业)、有效作业时间最紧(一般2-3天)和安全风险最大(农药残留和农药进入环境)的环节。水田高地隙喷杆喷雾机是水稻生产主要的植保机械,具有轻量化设计水田通过性好、高地隙适应水稻生长全时期、宽幅喷杆作业效率高和自动化程度高等特点。水田高地隙植保喷雾机主要包括行走底盘、喷洒系统和喷杆控制系统,行走底盘主要由动力系统、液压系统、电气系统、操纵系统、前驱动桥、后驱动桥、HST和驱动轮等组成,用于为植保喷雾机行走提供行走、转向和变速提供动力喷洒系统主要包括喷杆机构、喷头、液泵和喷洒控制阀组成,主要用于吸水和喷药。
工作原理:作业时,液泵吸水,与按规定投入的药剂混合、搅拌形成药液,药液从药箱流经过滤器后由液泵转换为高压药液,然后由阀组控制喷药开关和压力,经管路输送到喷杆,药液从喷杆喷头处喷出。通过驱动电动推杆调节喷杆的高度和倾斜角度,从而调节喷杆与喷雾机车身的相对高度和角度,始终保持喷杆以设定高度与水稻冠层平行。
仿真要素:喷洒系统是水田高地隙植保机核心部件,也是本实验仿真知识点的核心要素。重点仿真学习了解喷洒系统的结构特点、工作原理和调节操作等,仿真了解水田高地隙植保机在田间的作业实操要点(如药液准备、药量调节、仿形调节、机具升降、作业路线等)。
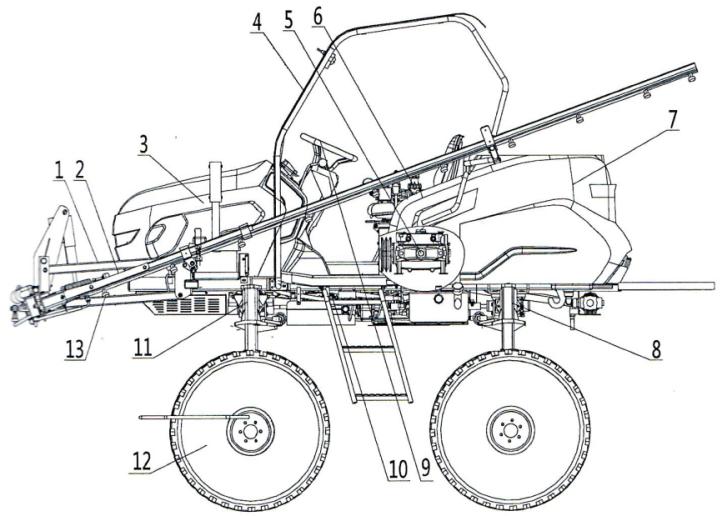
1.喷杆提升机构 2.喷杆总成 3.动力系统 4.简易防护罩 5.液泵 6.喷洒控制阀 7.药箱 8.后驱动桥 9.变速箱 10.HST 11.前驱动桥 12.驱动轮 13.喷头
图11 水田高地隙喷杆喷雾机总体结构
4.水稻收获环节
知识点(9):智能导航水稻联合收获机虚拟仿真实验(应用层次)
机具特点:水稻联合收获机智能导航系统采用BDS/GPS卫星导航定位技术,主要包括水稻联合收获机和导航系统,通过自动差速转向控制实现水稻联合收获机械沿预定收获路线的自动跟踪行驶。该系统应用于水稻收获环节,可以有效减轻驾驶员的劳动强度,提高水稻收获作业效率和质量,导航精度达到5cm,满幅收割率大于85%。
工作原理:水稻联合收获机导航的预定跟踪路线是由离散导航点连接构成的。农机导航时,自动驾驶控制器根据BDS/GPS 定位和跟踪路线的位置关系,计算出位置偏差d和航向偏差△ɸ,进而通过智能控制决策,确定期望的左右履带速度差△v。控制频率一般不小于10Hz。
仿真要素:本实验仿真知识点的核心要素是导航系统。重点仿真熟悉水稻联合收获机智能导航系统总体结构和工作原理,仿真学习智能导航系统显示界面的操作方法,模拟实际田间水稻收获机的导航作业。
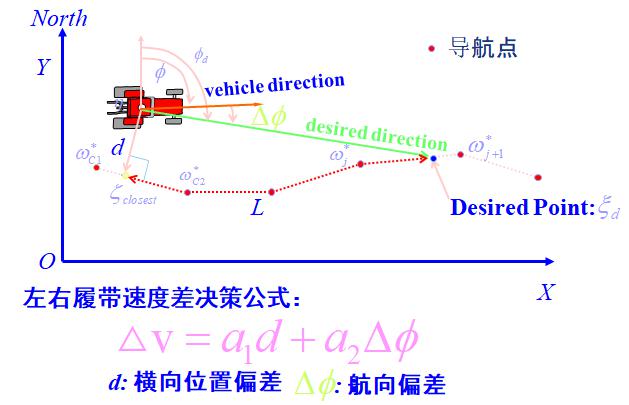
图12 收获机智能导航原理

图13 无人驾驶主从导航收获机系统
5.稻谷干燥环节
知识点(10):稻谷集中干燥装备虚拟仿真实验(应用层次)
机具特点:集中干燥是指将大量的粮食集中起来进行干燥的方式,其最明显特点即为集中和大批量。常见的自然方法如自然通风、摊晾、暴晒等因受自然条件影响较大,往往造成巨大损失。华南农业大学自主研发的稻谷集中干燥系统主要由干燥机、燃烧炉、提升机、高温风机、低温风机、冷风机、湿仓风机和控制台及软件系统等。
工作流程:首先,启动燃烧炉,开始预热干燥机。第二,粮食由入粮口经工人操作,进入卸粮口,然后启动提升机,将粮食运到干燥机。第三,待干燥机的下料位灯亮时,启动高温风机、低温风机和冷风机,开始干燥;待干燥机的上料位灯亮时,关闭电三通的干燥机端,使粮食流入湿谷仓;待湿谷仓的上料位灯亮时,启动湿仓风机。第四,干燥后的粮食经过提升机运输到干谷仓;第五,关闭总电源,退出界面,完成干燥。
仿真要素:本实验仿真知识点的核心要素是干燥机。重点仿真学习稻谷集中干燥系统的总体结构和干燥原理,仿真了解干燥机控制系统的操作界面和基本操作流程。
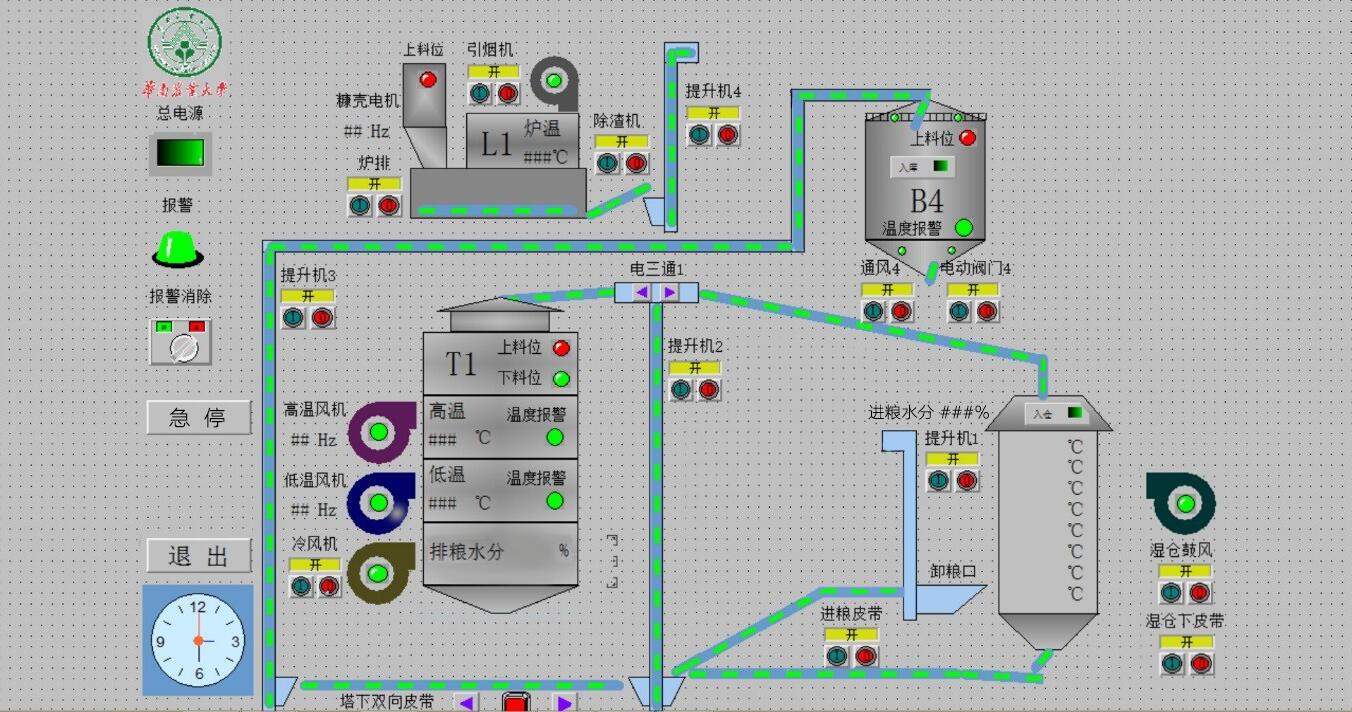
图14 稻谷集中干燥系统控制界面