虚拟实验
实验方法与步骤
一、实验方法描述:
本实验主要采用综合应用多媒体、三维建模、人机交互、传感器、虚拟现实等网络化、数字化、智能化技术手段,提高实验教学项目的吸引力和教学有效度。寓教于乐,在体验式学习中掌握水稻生产全程机械化关键环节的生产过程,并使学生在其中自己思考,自己了解,在人机交互和反馈的过程中进行自我设计创新。
水稻生产全程机械化关键环节虚拟仿真实验项目涵盖耕整、种植、田间管理、收获和谷物干燥五个关键环节,涉及旋耕机、水田激光平地机和水稻直播机等10种机具或装备,根据教学大纲和课程要求设置核心知识点、关键部件虚拟调整和参数确定、仿真操作和大田虚拟驾驶等虚拟仿真内容。学生通过理论学习、虚拟操作和实验考核的方式,系统学习水稻生产全程机械化过程,掌握关键环节典型先进农业装备的结构、调整和操作等知识。
实验操作时,学生登录虚拟仿真实验平台,认真阅读注意事项,根据专业培养要求和课程需要,可选择相应的生产环节和知识进行虚拟仿真实验。
二、学生交互性操作步骤说明:
1.水田耕整环节
(1)水田旋耕机虚拟仿真实验(认知层次)
步骤1:旋耕机结构认识与虚拟仿真作业
点击设备认知,进入虚拟场景,调整旋耕机虚拟三维视图,观察整机结构,然后逐一点击视图上的构造知识点(机架、传动装置、刀轴、刀片、罩壳和平地拖板等部件),学习每个部件的结构和作用,对旋耕机构造进行全面的了解,掌握刀片的安装方法。
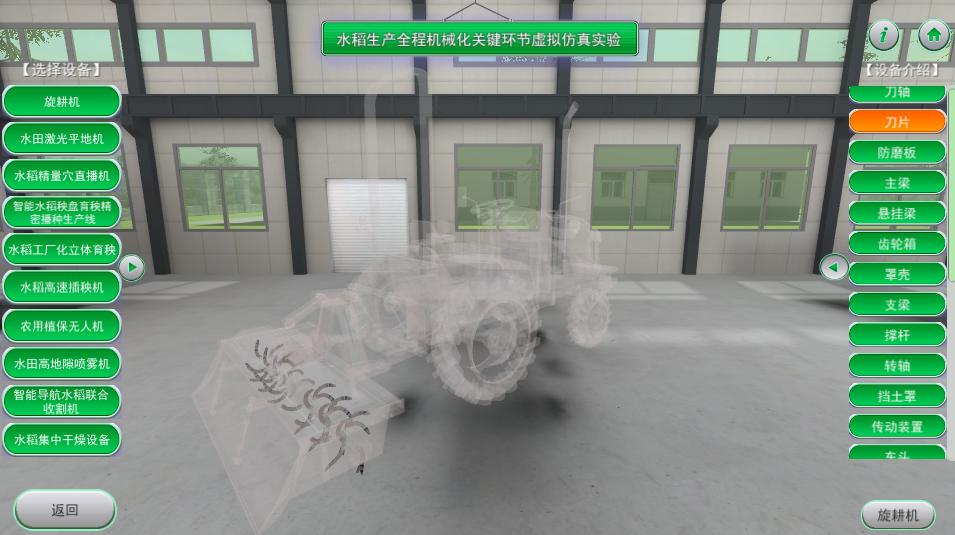
图15 旋耕机刀片虚拟安装
然后点击运行模拟,进入旋耕机水田虚拟作业仿真环境,根据提示依次完成旋耕虚拟仿真实验,熟悉水田旋耕作业过程,了解旋耕操作要领。

图16 旋耕机虚拟仿真作业
具体实验过程为:选择田块→确定旋耕路线→启动机器(钥匙开关置于“开”位置)→参数调整(旋耕机水平和高度调整、动力切换)→虚拟旋耕作业演示。
(2)水田激光平地机虚拟仿真实验(应用层次)
步骤2:平地系统认知与安装调试
点击设备认知,进入虚拟仿真环境,调整水田激光平地机虚拟三维视图。观察整机结构,熟悉平地机的机械系统、液压系统、控制系统,掌握水田激光平地机的基本组成,熟悉水田激光平地机高程控制原理与调平控制原理。
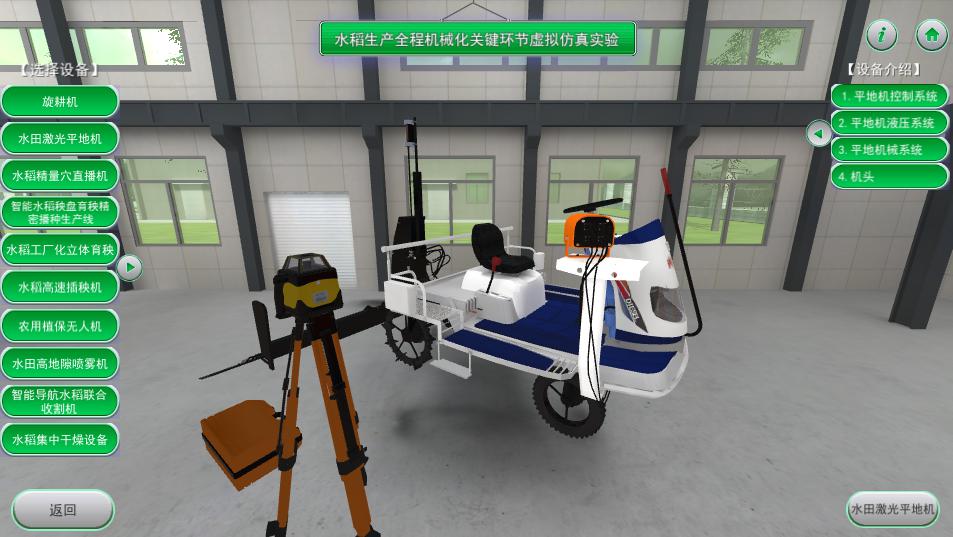
图17 水田激光平地系统组成
点击设备调试,进入水田激光平地机设备调试环节,依次架设激光发射器,安装激光接收器,通过控制面板按键控制平地铲动作,确保控制系统,液压系统,机械系统能够正常工作。进入标定程序,按照步骤完成控制器对拉线传感器的标定。

图18 平地系统虚拟安装操作
步骤3:水田激光平地机虚拟仿真作业
点击运行模拟,进入水田激光平地机平地环节,打开控制器,调节平地铲放置合适的平地高度,升降安装桅杆至激光接收器处于绿灯状态,控制面板打到自动。在自动下,调平平地铲,开始平地。

图19 水田激光平地机虚拟仿真作业
2.水稻种植环节
(2)水稻精量穴直播机虚拟仿真实验(掌握层次)
步骤4:水稻直播机构造认识与参数调整
点击设备认知,进入虚拟场景,调整水稻直播机虚拟三维视图,观察整机结构,然后逐一点击视图上的构造知识点(动力机头、动力传动机构、排种器、种箱、滑板、蓄水沟开沟器、播种沟开沟器、仿形装置、挂接平衡装置等部件),学习每个部件的结构和作用,对直播机构造进行全面的了解。

图20 水稻同步施肥精量穴直播机虚拟结构
打开虚拟排种器结构图,以三维爆炸图的方式展示排种器的结构。了解每个组成部分的作用与调整方式,掌握排种量的调节方法。
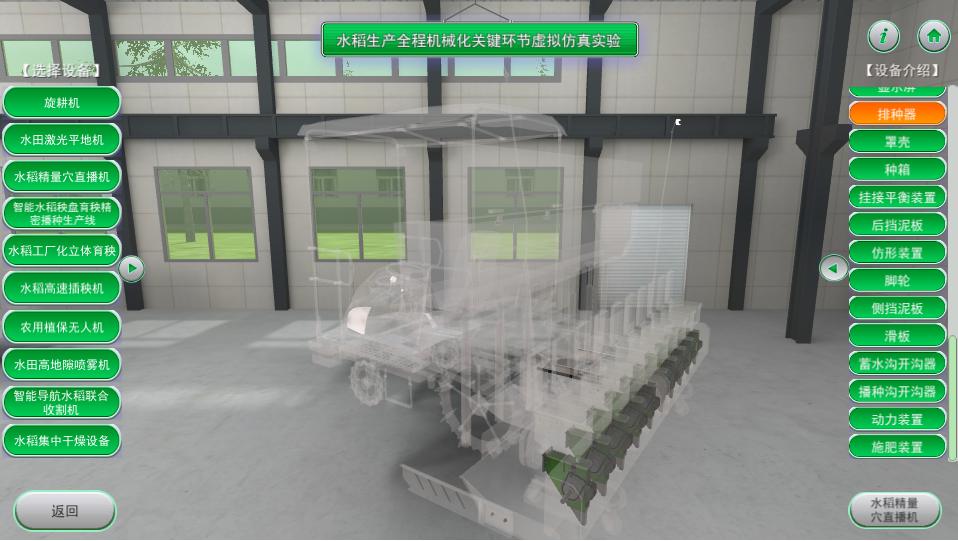
图21 可调型孔式排种器结构认识
打开虚拟仿形系统,了解水平仿形仿形装置的组成和工作原理,垂直仿形装置的组成和工作原理。
根据理论学习的每亩播种量的计算方法,选择合适的行距(20cm或者25cm),调整播种穴距调节手柄,确定合适的穴距。调整排种器型孔大小确定排种量,通过理论计算和虚拟操作掌握亩播种量的确定和调整方法。

图22 穴距设置操作
步骤5:水稻直播虚拟仿真作业
点击运行模拟,进入水稻直播虚拟作业仿真环境,根据提示依次完成虚拟仿真实验。通过虚拟驾驶和田间作业,熟悉直播机路面行驶和田间播种等环节的操作技能及注意事项,掌握水稻直播机播种作业过程。具体实验过程为:
路面驾驶:启动机器(钥匙开关置于“开”位置)→提升机具→锁紧油压锁止手柄→设置主变速手柄(“前进”或“后退”位置)→缓慢踩下变速踏板→转动方向→驾驶至待播田头。
路面转水田驾驶:启动机器(钥匙开关置于“开”位置)→提升机具→锁紧油压锁止手柄→设置主变速手柄(“前进”位置)→调整油门手柄(低速位置)→缓慢踩下变速踏板→踩下差速锁止踏板→转动方向盘(机器和田埂呈直角进出水田)。
田间播种作业:启动机器(钥匙开关置于“开”位置)→加稻种(打开种箱盖加种)→调节油压感度(置于“三刻度”位置)→调整油压锁止手柄(置于“解除”位置)→调节播种穴距手柄(穴距为10cm或18cm)→打开右侧划线杆→设置中央标杆→打开侧标杆→选择播种路线(选择方形或梯形田块)→设置主变速手柄(置于“前进”位置)→调整插值手柄(置于“合”位置)→缓慢踩下变速踏板→进入自动播种状态→播种完自动停机→卸种(卸种板置于打开状态)。

图23 水稻直播虚拟仿真作业
(2)智能水稻秧盘育秧精密播种生产线虚拟仿真实验(应用层次)
步骤6:水稻秧盘育秧精密播种生产线构造认识
点击设备认知,进入虚拟场景,调整智能水稻秧盘育秧精密播种生产线的虚拟三维视图,观察整机结构和各个部件的机械机构,然后逐一点击视图上的构造知识点(自动供盘、铺床土、压/刮床土、淋水、智能恒量精密播种、覆表土、清扫、自动叠盘装置等部件),学习每个部件的结构和工作原理,对整条生产线的机械构造进行全面了解。
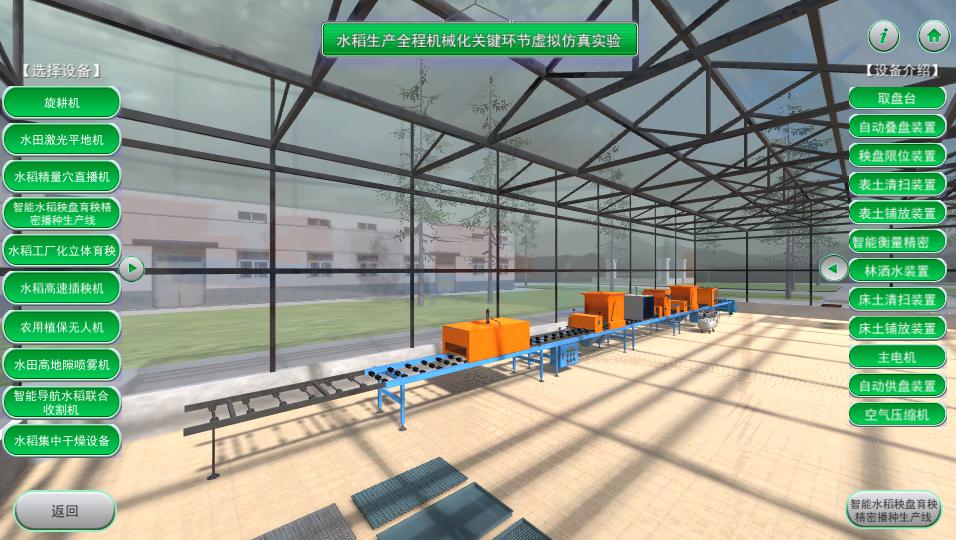
图24 水稻秧盘育秧精密播种生产线虚拟结构
步骤7:关键参数调整与虚拟育秧播种
点击运行模拟,完成对生产线自动供盘、铺床土、压/刮床土、淋水、智能恒量精密播种、覆表土、清扫、自动叠盘装置的启动前调整。了解每个组成部分的作用与调整方式,掌握设备各部件的调节方法。
然后依次点击自动供盘、精密播种和自动叠盘,学习水稻秧盘育秧精密播种虚拟仿真过程。
(3)水稻工厂化育秧系统虚拟仿真实验(认知层次)
步骤8:水稻工厂化育秧系统认知
点击设备认知,进入虚拟场景,调整水稻工厂化育秧系统的虚拟三维视图,观察温室结构和里面所包含的各个组成部分,然后逐一点击视图上的构造知识点(温室气候环境检测控制设备、立体育秧装置、补光系统、催芽机等装置),学习每个组成部分的结构和工作原理,对水稻工厂化育秧系统的构造进行全面的了解。
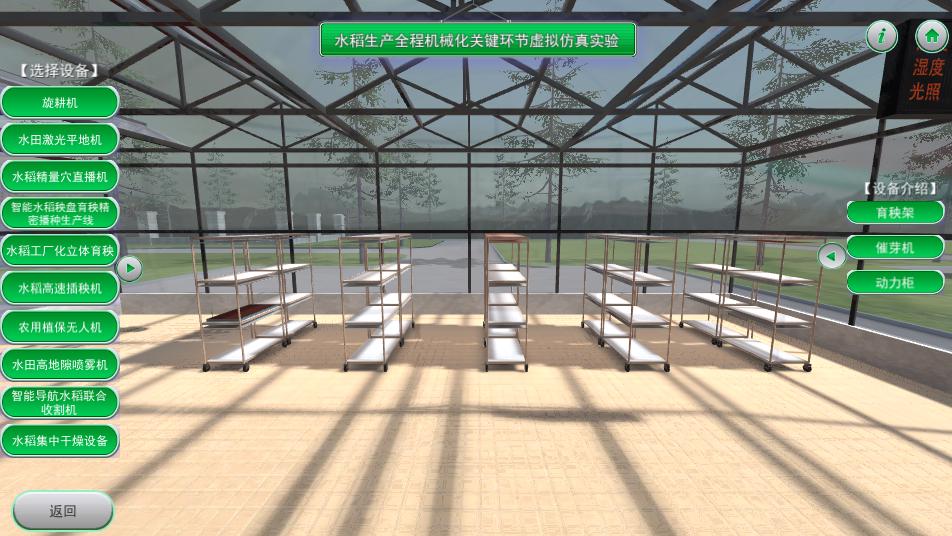
图25 水稻工厂化育秧虚拟环境
步骤9:系统参数确定与工厂化育秧过程仿真演示
点击运行模拟,进入工厂化育秧仿真操作交互环境,了解整个工厂化育秧的过程,按如下流程进行模拟操作。
种子的准备→育秧土准备→秧盘准备→精密播种→温度控制→氧气控制→氮素营养控制→炼苗。
熟悉种子准备的五大步骤:晒种、选种、浸种、消毒和催芽。

图26 虚拟炼苗环境
(4)同步施肥水稻高速插秧机虚拟仿真实验(应用层次)
步骤10:同步施肥水稻高速插秧机构造认识
点击设备认知,进入虚拟场景,调整水稻插秧机虚拟三维视图,观察整机结构,然后逐一点击视图上的构造知识点(主变速杆、副变速杆、株数副变速杆、预备苗台、秧架、中心标杆(秧苗不足警告灯)、划线杆、插植杆、秧爪、插秧离合器、取苗量调节杆、插秧深度调节杆等部件),学习每个部件的结构和作用,对插秧机构造进行全面的了解。

图27 同步施肥高速插秧机虚拟结构
步骤11:同步施肥水稻高速插秧机参数调整与虚拟作业仿真
①仓库出仓到水田的流程。
按下踏板,旋转钥匙,发动插秧机,切换行走档位,通过多功能操作手柄上的按钮,上升键,抬起插植部,向前推动多功能操作手柄,推动插秧机行走至田边。
②进入田块的准备工作。
将秧苗放置在预备苗台上,将秧苗放置在秧架上,打开划线杆,切换档位为插秧档位,行驶至田块角落,利用多功能操作手柄上的插秧按钮,放下插植部。
③进行插秧作业:放下插植部后,再按下插秧按钮,启动插秧模式,推动手柄向前,同时进行插秧。

图28 虚拟田间同步施肥插秧作业操作
正常z字插秧:假设田块为四边形,在绿色点开始进行插秧,其插植部位置距离身后田埂距离刚好6行秧苗身位。采用z字来回插秧的方式,在接近田埂时,当机器前部快要碰到田埂时,在多功能操作手柄上,按下上升按钮,并朝箭头方法打方向盘,待机器回正后,按下插植按钮,放下插植部,再次按下插植按钮,启动插秧,并继续推进手柄,进行插秧操作。
周围插秧:当z字形插秧,走完田中大部分区域后,如图所示,绕四周进行插秧工作,合理运用手柄控制机器前进后退,将田块边缘处,进行插秧。
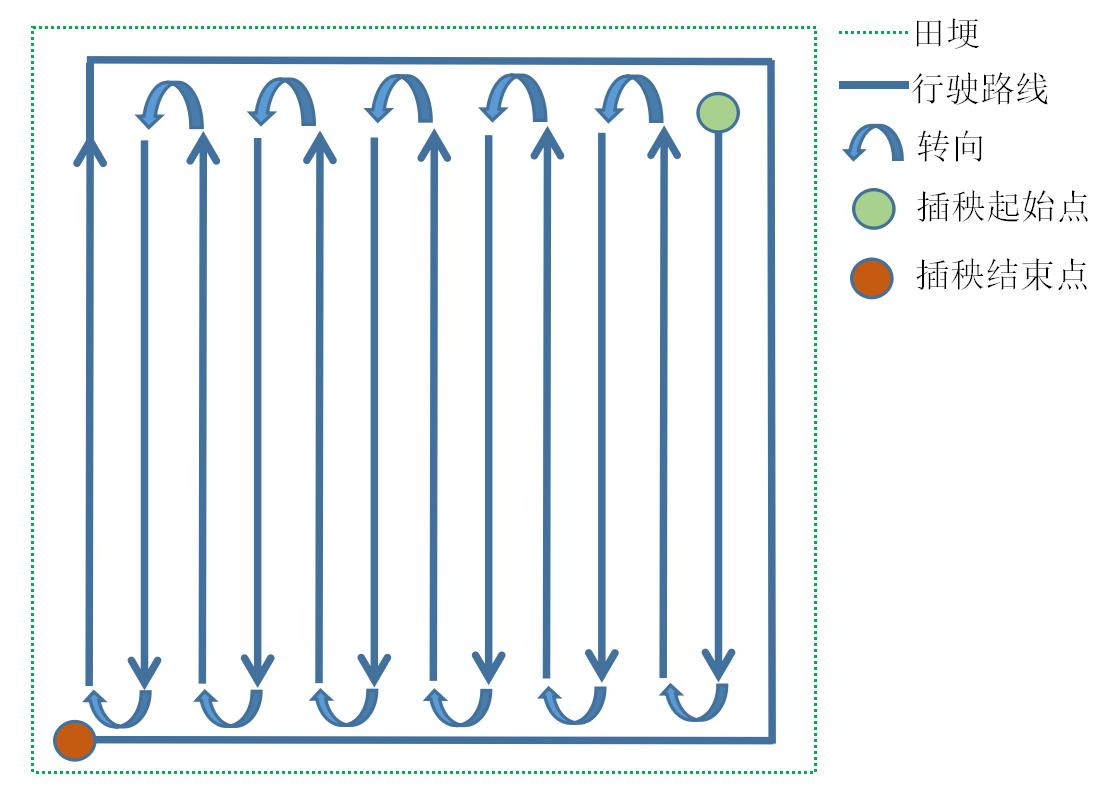
(配合图片,在插秧操作完成后,插秧的动画过程中,讲解插秧的路线规划过程。)
在红色插秧结束点这一行上(添加个知识点,考察学生对插秧离合的认识),该行距离大,有8行的距离(插秧机工作行为6行),因此可以关闭靠左的两个插秧离合杆,只让右边2行进行插秧,完成2行后,再后退至结束前这一行的出发点,开启插秧离合杆,进行最后6行的插秧作业。(该过程可用文字描述)
在红色点结束插秧,并按下手柄上的上,抬起插植部,完成插秧工作。
3.田间管理环节
(1)水田植保无人机虚拟仿真实验(应用层次)
步骤12:水田植保无人机作业地块选择
点击运行模拟,进入虚拟场景,观察待选田块形貌,观察田块特征,然后逐一点击视图上的田块类型(长方形、梯形、异性等),了解每个田块的特征,对无人机飞行前的作业环境进行全面的了解,完成后选择进入(某种田块)植保作业;
步骤13:水田植保无人机虚拟飞行作业
点击运行模拟,进入虚拟场景,观察植保无人机悬停飞行作业场景。
点击手动飞行无人机操控帮助界面。包括前移W键,左移A键,右移D键,后退S键。同时提示可以使用鼠标拖动旋转无人机转向。然后给出飞行示例;
点击自主飞行无人机参数设置界面,进行无人机飞行速度、飞行高度等飞行参数的设置。弹出作业参数设置界面,进行无人机作业航线类型、作业面积、喷施流量等参数的设置,然后给出飞行示例。
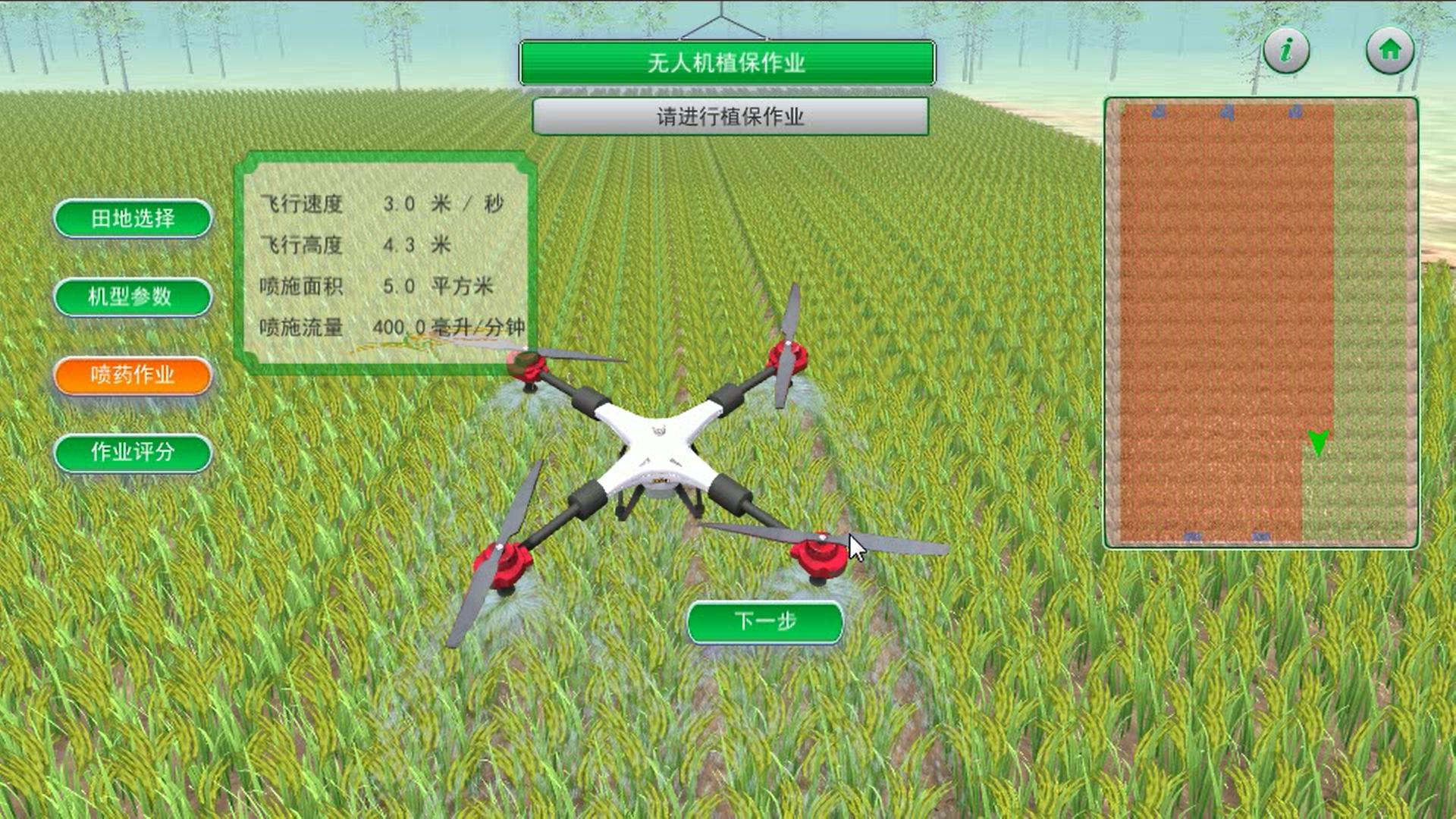
图29 水田植保无人机虚拟喷药操作
(2)水田高地隙植保机虚拟仿真实验(应用层次)
步骤14:水田高地隙植保机构造认识
点击设备认知,进入虚拟场景,调整水田高地隙植保机虚拟三维视图,观察整机结构,了解行走底盘和喷洒系统,熟悉喷杆高程和水平控制原理。

图30 水田高地隙植保机虚拟结构
步骤15:水田高地隙植保机虚拟植保作业仿真
点击运行模拟,启动机器交互操作:液泵手柄处于分离位,主变速档位和副主变速档位处于空挡,搅拌泵手柄处于停止位,喷雾开关处于关闭状态→踩住离合踏板→转动钥匙→启动喷雾机。
路面驾驶:踩离合踏板→设置副变速档位(L档、M档或H档)→设置主变速档位(1挡或2挡,倒挡用于倒车)→松开离合踏板→踩油门踏板→喷雾机行驶到农田。
田间喷雾作业:设置喷杆高度(按喷杆“上升”或“下降”按钮)→打开喷杆(按左右喷杆打开按钮)→设置液泵手柄(置为“合”位)→设置左、中、右喷雾开关(置于“开”位置)→设置喷雾总开关(置于“开”位置)→调节喷雾压力(旋转柱塞泵,看压力表调节压力)→踩离合踏板→挂挡(1挡或2挡)→踩油门行走。

图31 水田高地隙植保机虚拟喷药操作
停止喷雾机:踩离合踏板→挂挡(置于“空挡”)→设置主阀档位(拨到“停止”)→关闭喷雾总开关(置于“关”位置)→关闭左中右喷雾开关(置于“关”位置)→踩离合,设置泵位(液泵手柄置于“离”位)→关闭药箱搅拌泵→收纳左右喷杆→下降喷杆(按喷杆“全体下降”按钮)→关闭喷雾机(钥匙开关置于“关”位置)。
4.水稻收获环节
(1)智能导航水稻联合收获机虚拟仿真实验(应用层次)
步骤16:智能导航水稻联合收获机构造认识
点击设备认知,智能导航水稻联合收获机包括水稻联合收获机车体和智能导航系统两个组成部分。水稻联合收获机车体包括履带底盘、车身和割台。智能导航系统包括:GNSS定位设备、导航控制器、显示终端和电液比例阀组等部分。进入设备介绍环节,可逐一点击选项查看其构造和功能。

图32 智能导航水稻联合收获机虚拟结构
步骤17:智能导航水稻联合收获机虚拟收获仿真
点击运行模拟,进入智能导航水稻联合收获机虚拟收获仿真环境,根据提示依次完成虚拟仿真实验,通过虚拟驾驶和田间作业,熟悉联合收获机路面行驶和田间收获等环节的操作技能,掌握水稻联合收获机智能导航作业系统的使用方法。具体实验过程为:
路面驾驶:启动机器(钥匙开关置于“开”位置)→前后缓慢推动作业手柄提升收获机割台→设置主变速手柄(“前进”或“后退”位置)→设置副变速手柄(“作业1档”或“作业2档”位置)→缓慢推动油门手柄加减油门→左右拨动作业手柄使收获机转向→驾驶至待收田头。
田间智能导航收获作业:启动机器(钥匙开关置于“开”位置)→上电智能导航系统→手动将机器开至第一条作业行起点→观察显示终端故障诊断界面的状态数据→观察显示终端右上角信号标志是否为绿色正常→点击打开作业设置界面设置AB线的A点→手动将机器开至第一条作业行终点(期间需要放下割台收获第一行)→设置AB线的B点→设置收获机割幅→手动提升割台将机器调头至第二作业行→放下割台,点击显示终端左下角“方向盘”按钮开始自动导航作业→到达地头后再次点击“方向盘”按钮停止自动导航→手动提升割台将机器调头至下一作业行并重复前述步骤→地块收获完断电智能导航系统。

图33 智能导航水稻联合收获机虚拟收获操作
5.稻谷干燥环节
(1)稻谷集中干燥装备虚拟仿真实验(应用层次)
步骤18:稻谷集中干燥系统认识
进入虚拟场景,调整水稻干燥机虚拟三维视图,观察整机结构,然后逐一点击视图上的构造知识点(提升机、干燥机、热风炉、清选筛、湿谷仓、传送带、控制台、干谷仓、水分在线检测仪、引风电机等部件),学习每个部件的结构和作用,对干燥机构造进行全面的了解。

图34 稻谷干燥系统虚拟结构
步骤19:稻谷集中干燥虚拟仿真演示
点击运行模拟,按下干燥机控制台的上电按钮,干燥机总机上电,然后进入系统控制界面。点击高温风机及低温风机旁边的输入框,弹出数字键盘,输入高温及低温温度,以匹配合理的干燥参数值。机器启动后充分预热,然后将电三通的右侧三角按下,使粮食进入湿谷仓,此时启动提升机1开始进粮食,进粮水分仪显示进粮水分。待湿谷仓料位灯亮起时,启动湿谷仓风机,并将电三通的左侧三角按下,粮食流向左侧干燥机。待干燥机下料位亮灯,出粮水分仪显示水分。待干燥机上料位亮灯,关闭提升机1,停止进粮,启动提升机3,使粮食进入干谷仓。待上料位灯灭,然后下料位灯灭,此时启动进粮皮带开始送入湿谷仓内的粮食,待湿谷仓料位灯灭时,关闭湿谷仓风机。待干谷仓料位灯亮后,所有粮食干燥完毕。此时关闭进粮皮带,关闭提升机3,点击总电源关闭电源,完成此批次粮食干燥。
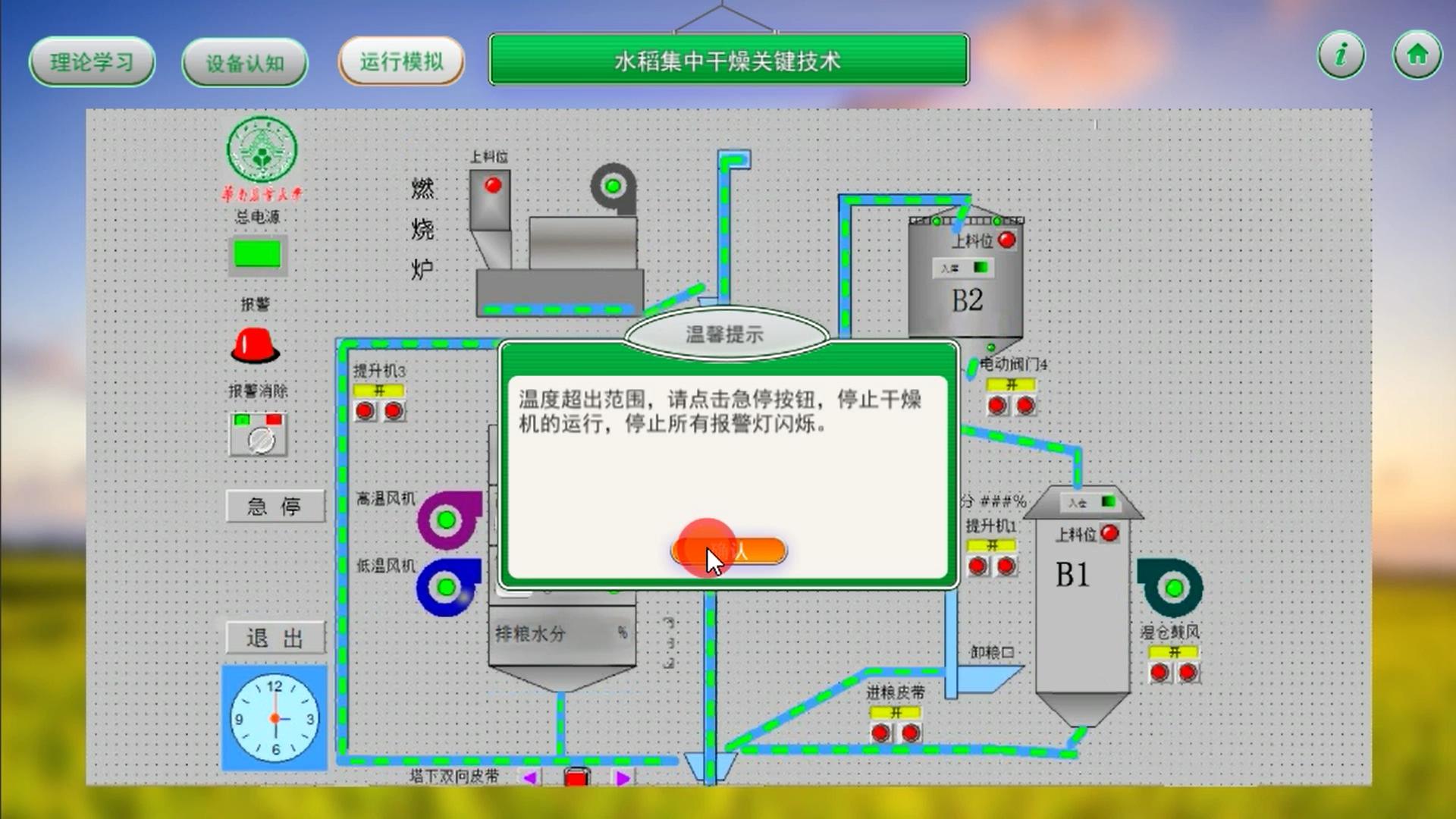
图35 稻谷集中干燥关键参数设定
步骤20:考核
各环节虚拟仿真实验结束后点击进入考核环节,学生要完成考核内容,提交后马上显示实验成绩,成绩不合格或者不满意可进行反复进行虚拟实验,合格者可撰写实验心得,提交实验报告。